
ÖCŲ„╚╦īWĮńī”ÖCąĄ╩ųĄ─▀\äėīW║═äė┴”īWęčĮø┴╦ĮŌĄ├ŽÓ«öČÓ├µ┴╦ĪŻ╚╗Č°Ż¼ÖCąĄ╩ųų„ ę¬┐╝æ]Ą─╩ŪĻP╣Ø▀\äėīW║═äė┴”īWĄ─┐žųŲå¢Ņ}Ż¼Č°ęŲäėÖCŲ„╚╦ų„ę¬┐╝æ]Ą─╩Ū┘|³c▀\äėīW║═äė┴” īW┐žųŲå¢Ņ}ĪŻÅ─ÖCąĄ║═öĄīW▒Š┘|╔ŽüĒšfŻ¼╦³éā╩Ū▓╗═¼Ą─ĪŻ
ęŲäėÖCŲ„╚╦ŽĄĮy─Żą═─┐Ū░┐╔Ęų×ķ▀\äėīW─Żą═║═äė┴”īW─Żą═ā╔┤¾ŅÉŻ¼ā╔ĘNŪķørŽ┬ÖCŲ„╚╦▀\ äė┐žųŲėą▓╗═¼Ą─┐žųŲūā┴┐ĪŻę╗ĘN×ķ╗∙ė┌▀\äėīW─Żą═Ą─╦┘Č╚┐žųŲŻ¼┴Ēę╗ĘN╩Ū╗∙ė┌äė┴”īW─Żą═Ą─ ┴”Šž┐žųŲĪŻ▒Š╣Øīóėæšōā╔▌åd┴ó“īäėĘĮ╩ĮĄ─ęŲäėÖCŲ„╚╦Ą─▀\äėīW─Żą═ĪŻ
ęį╦─▌åÖCŲ„╚╦×ķ└²Ż¼Ųõųą║¾├µā╔▌å╩Ūd┴ó“īäė▌åŻ¼Ū░├µā╔▌å╩Ū╚fŽ“▌åŻ¼ÖCŲ„╚╦Ą─▀\äėģóöĄ║═ū°ś╦ŽĄ
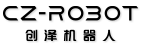
X ĪóY ×ķ╩└Įńū°ś╦ŽĄŻ╗
O: ×ķęŲäėÖCŲ„╚╦Ą─Äū║╬ųąą─Ż╗
C: ╩Ūā╔“īäė▌åĄ─▌å▌Sųąą─Ż╗
R: ▄ć▌å░ļÅĮŻ╗
2L: ā╔éĆ“īäė▌å▌åą─ķgĄ─ŠÓļxŻ╗
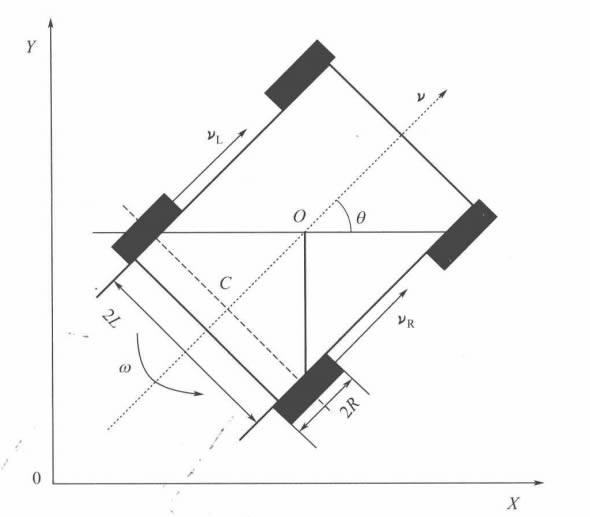
v: ÖCŲ„╚╦Ą─Ū░▀M╦┘Č╚Ż╗
w: ÖCŲ„╚╦▄ć¾wĄ─▐DäėĮŪ╦┘Č╚Ż╗
VL,VR: ÖCŲ„╚╦ū¾ėę▌åĄ─ŠĆ╦┘Č╚Ż╗
”╚:ÖCŲ„╚╦Ą─ū╦ä▌ĮŪŻ╗
╝┘įOÖCŲ„╚╦į┌╦«ŲĮ├µ▀\äė▓óŪę▄ć▌å▓╗Ģ■░l╔·ą╬ūāĪŻÖCŲ„╚╦ā╔éĆ╣╠Č©Ą─“īäė▌åė╔å╬dĄ─“ī äėŲ„Ęųäe“īäė┐žųŲŻ¼╝┘Č©▄ć▌å┼cĄž├µĮėė|³c╦┘Č╚į┌┤╣ų▒ė┌▄ć▌åŲĮ├µā╚Ą─Ęų┴┐×ķ┴ŃŻ¼“īäė▌å┼c Ąž├µĪ░ų╗─▄▐DäėČ°▓╗─▄╗¼äėĪ▒,ØMūѤo╗¼äėŚl╝■ĪŻį┌¤o╗¼äė╝āØLäėĄ─Śl╝■Ž┬Ż¼▌åūėį┌┤╣ų▒ė┌ ▌åŲĮ├µĄ─╦┘Č╚Ęų┴┐×ķ┴ŃŻ¼ŽĄĮy╝s╩°Śl╝■╚ńŽ┬Ż║
x sin”╚Ī¬ycos”╚=0
ęŲäėÖCŲ„╚╦─▄ē“ų▒Įė▀Mąą┐žųŲĄ─╩Ūā╔éĆd┴ó“īäėļŖÖCŻ¼ę“┤╦▓╔ė├ [vL,vR] ą╬╩ĮĄ─▌ö ╚ļ┐žųŲ┴┐Ż¼üĒĘųäe┐žųŲā╔éĆ“īäė▌åĪŻŽ┬├µėæšō╚ń║╬īóÖCŲ„╚╦Ą─Ū░▀M╦┘Č╚v ║═▐Däė╦┘Č╚w ▐D ╗»×ķÖCŲ„╚╦ā╔éĆ▌åūėĄ─ŠĆ╦┘Č╚v₁ ║═vRĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



