ÖCŲ„╚╦ĘųŅÉĘĮĘ©ėą║▄ČÓĘNĪŻ▀@└’Ž╚ĮķĮB╚²ĘNĘųŅÉĘ©Ż¼╝┤Ęųäe░┤ÖCąĄ╩ųĄ─Äū║╬ĮYśŗĪó ÖCŲ„╚╦Ą─┐žųŲĘĮ╩Įęį╝░ÖCŲ„╚╦┐žųŲŲ„Ą─ą┼Žó▌ö╚ļĘĮ╩ĮüĒĘųĪŻ
1. ░┤ÖCąĄ╩ųĄ─Äū║╬ĮYśŗüĒĘų
ÖCŲ„╚╦ÖCąĄ╩ųĄ─ÖCąĄ┼õų├ą╬╩ĮČÓĘNČÓśėĪŻZ│ŻęŖĄ─ĮYśŗą╬╩Į╩Ūė├Ųõū°ś╦╠žąįüĒ├Ķ╩÷ Ą─ĪŻ▀@ą®ū°ś╦ĮYśŗ░³└©Ąč┐©ā║ū°ś╦ĮYśŗĪóų∙├µū°ś╦ĮYśŗĪóJū°ś╦ĮYśŗĪóŪ“├µū°ś╦ĮYśŗ║═ĻP ╣Ø╩ĮŪ“├µū°ś╦ĮYśŗĄ╚ĪŻ▀@└’║åå╬ĮķĮB╚²ĘNZ│ŻęŖĄ─ų∙├µĪóŪ“├µ║═ĻP╣Ø╩ĮŪ“├µū°ś╦ĮYśŗÖC
Ų„╚╦ĪŻ
(1)ų∙├µū°ś╦ÖCŲ„╚╦
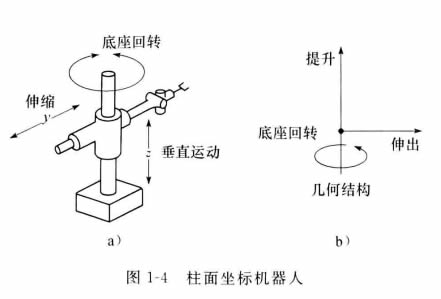
ų∙├µū°ś╦ÖCŲ„╚╦ų„ę¬ė╔┤╣ų▒ų∙ūėĪó ╦«ŲĮ╩ų▒█(╗“ÖCąĄ╩ų)║═Ąūū∙śŗ│╔ĪŻ╦«ŲĮ ÖCąĄ╩ųčbį┌┤╣ų▒ų∙ūė╔ŽŻ¼─▄ūįė╔╔ņ┐sŻ¼ ▓ó┐╔čž┤╣ų▒ų∙ūė╔ŽŽ┬▀\äėĪŻ┤╣ų▒ų∙ūė░▓ čbį┌Ąūū∙╔ŽŻ¼▓ó┼c╦«ŲĮÖCąĄ╩ųę╗Ų(ū„ ×ķ ę╗éĆ▓┐╝■)─▄į┌Ąūū∙╔ŽęŲäėĪŻ▀@śėŻ¼ ▀@ĘNÖCŲ„╚╦Ą─╣żū„░³█E(ģ^ķg)Š═ą╬│╔ę╗ Č╬łAų∙├µŻ¼╚ńłD1-4╦∙╩ŠĪŻę“┤╦Ż¼░č▀@ĘNÖCŲ„╚╦Įąū÷ų∙├µū°ś╦ÖCŲ„╚╦ĪŻ
(2)Ū“├µū°ś╦ÖCŲ„╚╦
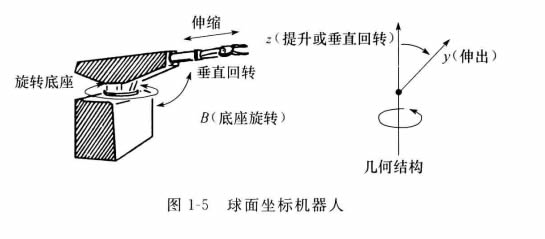
▀@ĘNÖCŲ„╚╦╚ńłD1-5╦∙╩ŠĪŻ╦³Ž±╠╣┐╦Ą─┼┌╦■ę╗śėŻ¼ÖCąĄ╩ų─▄ē“ū÷└’═Ō╔ņ┐sęŲäėĪóį┌┤╣ų▒ŲĮ├µ╔Ž┤╣ų▒╗ž▐Dęį╝░į┌╦«ŲĮŲĮ├µ╔Ž└@Ąūū∙ą²▐DĪŻę“┤╦Ż¼▀@ĘNÖCŲ„╚╦Ą─╣żū„░³█Eą╬│╔Ū“├µ Ą─ę╗▓┐ĘųŻ¼▓ó▒╗ĘQ×ķŪ“├µū°ś╦ÖCŲ„╚╦ĪŻ
(3)ĻP╣Ø╩ĮŪ“├µū°ś╦ÖCŲ„╚╦
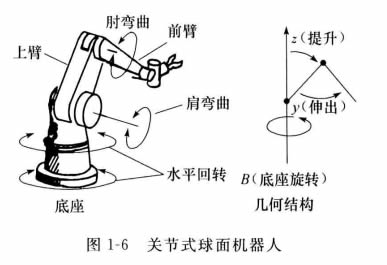
▀@ĘNÖCŲ„╚╦ų„ę¬ė╔Ąūū∙(╗“▄|Ė╔)Īó╔Ž▒█║═Ū░▒█śŗ│╔ĪŻ╔Ž▒█║═Ū░▒█┐╔į┌═©▀^Ąūū∙Ą─┤╣ų▒ŲĮ├µ╔Ž▀\äėŻ¼╚ńłD1-6╦∙╩ŠĪŻį┌Ū░▒█║═╔Ž▒█ķgŻ¼ÖCąĄ╩ųėąéĆųŌĻP╣ØŻ╗Č°į┌╔Ž▒█║═Ąūū∙ķgŻ¼
ėąéĆ╝ńĻP╣ØĪŻį┌╦«ŲĮŲĮ├µ╔ŽĄ─ą²▐D▀\äėŻ¼╝╚┐╔ ė╔╝ńĻP╣Ø▀MąąŻ¼ę▓┐╔ęį└@Ąūū∙ą²▐DüĒīŹ¼FĪŻ▀@ ĘNÖCŲ„╚╦Ą─╣żū„░³█Eą╬│╔Ū“├µĄ─┤¾▓┐ĘųŻ¼ĘQ×ķ ĻP╣Ø╩ĮŪ“├µÖCŲ„╚╦ĪŻ
ŃU╦ßąŅļŖ│žĮø│Żė├6éĆå╬Ė±ŃU╦ßąŅļŖ│ž┤«┬ōŲüĒĮM│╔ś╦ĘQ×ķ12VĄ─ŃU╦ßąŅļŖ│ž;õćļŖ│ž╩ŪŃU╦ßąŅļŖ│žĄ─6Ī½7▒Č,╩╣ė├ē█├³ķL│õĘ┼ļŖų▄Ų┌┐╔ęį│¼▀^500┤╬,┴ū╦ßüåĶFõćät┐╔ęį▀_ĄĮ2000┤╬
šZę¶ūRäe─ŻēKÅ─ę¶Ņl▌ö╚ļįOéõųą½@Ą├Ą─ė├涚Z궹┼╠¢;šZčį└ĒĮŌ─ŻēK▐DōQ│╔ėŗ╦ŃÖCā╚▓┐╦∙▒Ē╩ŠĄ─ą╬╩Į╗»šZčį;ūį╚╗šZčį╔·│╔─ŻēKīóŽĄĮy▌ö│÷ą┼Žó▐DōQ│╔ė├æ¶┐╔ęį└ĒĮŌĄ─ūį╚╗šZčįĖ±╩Į
└¹ė├Ė„ĘNįŁ└ĒųŲ│╔Ą─ÜŌ¾wūįäėĘų╬÷āxęčĮøėą║▄ČÓĘNŅÉŻ¼¼Fį┌ÅVĘ║ Ąžæ¬ė├ė┌Öz£yĖ„ĘNČŠÜŌŻ¼Ęų╬÷ÜŌ¾w│╔ĘųŻ¼▒O▓ņŁhŠ│Ą╚ĘĮ├µŻ¼Č╝║═ļŖ¼FŽ¾ėąĻPŻ¼╦∙ęį╚╦éā░č╦³éāĮąū÷ļŖūė▒Ū
ė├æ¶┐╔ęįė├ūņų▒ĮėŽ“Ę■äšÖCŲ„╚╦░l▓╝ųĖ┴Ņ,Å─Č°Ė─ūā┴╦ė├æ¶į┌▓┘ū„Ę■äšÖCŲ„╚╦,─▄═©▀^┬Ģę¶Ķbäe╚╦Ą─ą─└ĒĀŅæBĄ╚å¢Ņ},▀Ć─▄ē“└ĒĮŌ╚╦Ą─Ž▓ÉéĪóæŹ┼ŁĪó¾@ėĀĪó¬qįź║═Ģß├┴Ą╚ŪķŠw
╚╦─śūRäeÖCŲ„╚╦Ą─č█Š”šJūų,ė├ė┌╩ųīæ╬─ūų▌ö╚ļ,ūC╝■,Ų▒ō■,▄ć┼ŲĄ─ūRäeĄ╚įSČÓĘĮ├µ;ūRłD,Å─łDŽ±ĮYśŗ╚ļ,蹊┐╦³éā╩Ū░┤šš╩▓├┤śėĄ─ęÄätśŗ│╔łDŽ±Ą─;šJ╬’ė├ė┌Ė„ŅÉ«aŲĘ═Ōė^Öz▓ķŻ¼┴Ń╝■Ęų▀x║═š¹ÖCčb┼õĄ╚įSČÓĘĮ├µ
╝╝ąg“īäė: äōą┬═╗ŲŲ╝ė╦┘«aśI╗»;š■▓▀ų¦│ų: ć°╝ęæ┬į┼c┘Y▒ŠāAą▒;╩ął÷ąĶŪ¾: ČÓŅIė“ł÷Š░▒¼░l;╔ńĢ■ę“╦ž: ä┌äė┴”ĮYśŗąįūāĖ’;┘Y▒Š┼c╚½Ū“╗»:┘Yį┤š¹║Ž“īäėį÷ķL
ÖCŲ„╚╦Ą─╚²éĆ╗∙▒Š╠žš„╩▄▀@ą®▀xō±╦∙ų¦┼õŻ║ÖCäėąįĪó┐╔┐žąį║═ĘĆČ©ąį;▒Ēųą├Ķ╩÷┴╦╠ž╩Ō▌åūėŅÉą═Ą─▀xō±║═ÖCŲ„╚╦Ąū▒P╔Ž╦³éāĄ─Äū║╬ĮYśŗ▀@ā╔éĆĘĮ├µ
į┌▀^╚źĄ─10─Ļųą,ęčĮøš╣╩Š┴╦Ė„ĘNŅÉą═Ą─│╔╣”Ą─ļp═╚ÖCŲ„╚╦,ę╗éĆųžę¬Ą─╠žš„╩Ū╦³éāŠ▀ėąŅÉ╦Ų╚╦Ą─═Ōą╬,▒žĒÜ▀B└mĄž▀Mąą╦┼Ę■ŲĮ║ŌąŻš²,═©▀^┼cŽ▐ųŲŽź╔wĻP╣ØĮŪČ╚Ą─Ī░Žź╔w╣ŪĪ▒ŽÓĮY║Ž,īŹ¼F┴╦¾@╚╦Ą─Ę┬╔·▀\äė
å╬═╚ÖCŲ„╚╦Ą─ų„ę¬└¦ļy╩Ū▒Ż│ųŲĮ║Ō,ÖCŲ„╚╦▒žĒÜų„äėĄžūį╬ęŲĮ║Ō,╗“š▀Ė─ūā╦³Ą─ųžą─,╗“š▀Įo│÷ąŻš²┴”,ÖCŲ„╚╦═©▀^š{╣ØŽÓī”ė┌╔Ē¾wĄ─═╚ĮŪŻ¼▓╗öÓĄžą▐š²╔Ē¾wū╦æB║═ÖCŲ„╚╦╦┘Č╚
į┌═╚╩ĮęŲäėÖCŲ„╚╦ŪķørŽ┬,į÷╝ėÖCŲ„╚╦═╚Ą─ūįė╔Č╚╠ßĖ▀┴╦ÖCŲ„╚╦Ą─ÖCäėąį,╝╚öU┤¾┴╦ÖCŲ„╚╦─▄ąąū▀Ą─ Ąžą╬ĘČć·,ėųį÷ÅŖ┴╦ÖCŲ„╚╦ęįĖ„ĘN▓ĮæBąąū▀Ą──▄┴”,╚▒³c╩ŪĦüĒäė┴”Īó┐žųŲ║═┘|┴┐ĘĮ├µĄ─å¢Ņ}
ų„ę¬ā׳c░³└©į┌┤ų▓┌Ąžą╬╔ŽĄ─ūį▀mæ¬ąį║═ÖCäėąį,─▄ė├Ė▀Č╚Ą─╝╝Ū╔üĒ▓┘┐vŁhŠ│ųąĄ─╬’¾w;╚▒³c░³└©äė┴”║═ÖCąĄĄ─Å═ļsąį,▒žĒÜ─▄ē“ų¦ō╬ÖCŲ„╚╦▓┐Ęų┐éųž┴┐
Š▀ėą╚½ĘĮ╬╗▌åĄ─ÖCŲ„╚╦ėą3éĆūįė╔Č╚▀\äėĄ──▄┴”,╝┤čžų° ŲĮ├µ╔Žx ▌S,y ▌Sęį╝░└@ūį╔Ēųąą─ą²▐DĄ─▀\äė─▄┴”,▀@│õĘųį÷╝ė┴╦ÖCŲ„╚╦Ą─ÖCäėąį,╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦┐╔ęįė╔▓╗═¼öĄ┴┐Ą─╚½ĘĮ╬╗▌åĮM│╔




