
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ę╗░ŃüĒšfŻ¼Ę■äšÖCŲ„╚╦Ī░ūņ░═Ī▒(╚╦ÖCī”įÆŽĄĮy)ė╔6éĆ╣”─▄─ŻēKĮM│╔Ż¼Ųõ═Ōą╬║═ŽĄĮy ĮYśŗ╚ńłD2.5╦∙╩ŠĪŻ
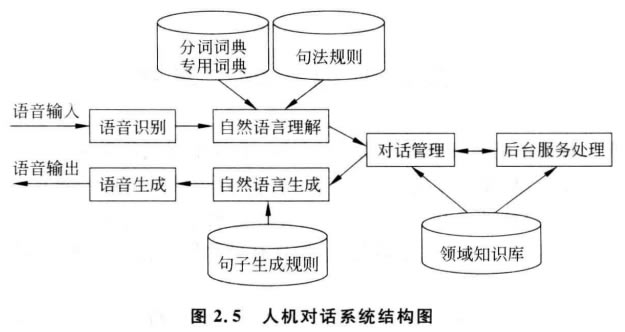
(1)šZę¶ūRäe─ŻēKĪŻįō─ŻēKīóÅ─ę¶Ņl▌ö╚ļįOéõųą½@Ą├Ą─ė├涚Z궹┼╠¢╦∙░³║¼Ą─į~ģR ā╚╚▌▐DōQ×ķėŗ╦ŃÖC┐╔ęįūxĄ─╬─▒Šą┼Žó╗“├³┴ŅĪŻ
(2)ūį╚╗šZčį└ĒĮŌ─ŻēKĪŻĄ├ĄĮĄ─╬─▒Šą┼Žó╗“├³┴ŅąĶę¬Įø▀^šZčį└ĒĮŌ─ŻēKĄ─Ęų╬÷▓┼─▄½@╚Īė├æ¶įÆšZĄ─šZ┴xą┼ŽóŻ¼ų„ę¬─┐Ą─╩Ūīóūį╚╗šZčįĄ─▒Ē▀_ą╬╩Į▐DōQ│╔ėŗ╦ŃÖCā╚▓┐╦∙▒Ē╩Š Ą─ą╬╩Į╗»šZčįŻ¼╚╗║¾Įø▀^ėŗ╦Ń║══Ųī¦║¾½@╚Īė├æ¶Ą─ęŌłDĪŻ
(3)ī”įÆ╣▄└Ē─ŻēKĪŻ╚╦ÖCī”įÆŽĄĮy╩Ūė├æ¶║═ėŗ╦ŃÖC░┤šš╠žČ©┤╬ą“╗źŽÓ½@╚Īī”ĘĮą┼Žó üĒ═Ļ│╔╠žČ©╚╬䚥─▀^│╠Ż¼┤╦▀^│╠ę¬ī”įÆ╣▄└Ē─ŻēKüĒ▀Mąąėąą¦Ą─┐žųŲ╣▄└ĒĪŻŲõų„ę¬Ė∙ō■«ö Ū░ė├æ¶Ą─įÆšZą┼ŽóŻ¼ĮY║ŽŅIė“ų¬ūR║═ī”įÆÜv╩ĘüĒ┤_Č©ė├æ¶ęŌłDŻ¼▓óøQČ©ŽĄĮyŽ┬ę╗▓Įīóę¬ ▓╔╚ĪĄ─äėū„Ż¼╚ńĘĄ╗ž▓ķįāĮY╣¹Ż¼ī”ė├æ¶ęŌłDĄ─▓┬£yįāå¢Ż¼│÷Õe╠ß╩ŠĄ╚ĪŻ
(4)║¾┼_Ę■äš╠Ä└Ē─ŻēKĪŻįō─ŻēK═Ļ│╔ŽĄĮyĄ─╣▄└ĒśI䚯¼└²╚ńöĄō■Äņ▓ķįā║═╣▄└ĒĄ╚╣ż ū„ĪŻ╦³į┌ī”įÆ╣▄└Ē─ŻēKĄ─┐žųŲų«Ž┬╣żū„ĪŻ
5)ūį╚╗šZčį╔·│╔─ŻēKĪŻįō─ŻēKė├üĒīóŽĄĮy▌ö│÷ą┼Žó▐DōQ│╔ė├æ¶┐╔ęį└ĒĮŌĄ─ūį╚╗šZčįĖ±╩ĮŻ¼īóī”įÆ╣▄└Ē─ŻēK▌ö│÷Ą─įāå¢Īó┤_šJĪó│╬ŪÕĪó▓ķįāĮY╣¹ą┼ŽóĄ╚▐Dūā│╔ė├æ¶─▄ē“└ĒĮŌ Ą─ūį╚╗šZčįĪŻ
(6)šZę¶╔·│╔─ŻēKĪŻšZę¶╔·│╔ę▓ĘQ×ķšZę¶║Ž│╔Ż¼įō╝╝ąg╩Ūīóūį╚╗šZčį╬─▒ŠĖ±╩Į▐DōQ │╔×ķšZę¶Ė±╩ĮŻ¼ZĮKęį┬Ģ궥─ĘĮ╩Įīó╠Ä└ĒĮY╣¹▌ö │÷Įoė├æ¶ĪŻŽ┬├µĮķĮBÄūéĆĘ■äšÖCŲ„╚╦Ī░ūņ░═Ī▒Ą─ īŹ└²ĪŻ
Į³─ĻüĒŻ¼SCUT Ī░ųŪ─▄ėŗ╦ŃÖCĪ▒┐ŲčąłFĻĀę▓ī” ┴─╠ņÖCŲ„╚╦š╣ķ_┴╦蹊┐Ż¼╚ńłD2.6╦∙╩ŠĪŻ╦¹éāķ_ ░lĄ─SCUT ┴─╠ņÖCŲ„╚╦░³└©özŽ±Ņ^╝░“īäė─ŻēKĪó šZę¶╩░╚Ī─ŻēKĪóšZę¶ūRäe─ŻēKĪóų¬ūR▓ķįā─ŻēKĪóšZ ę¶╔·│╔─ŻēKŻ╗özŽ±Ņ^▓Č½@╚╦─śłDŽ±Ż¼šZ궹┼╠¢Įø ė╔šZę¶╩░╚Ī─ŻēK║═šZę¶ūRäe─ŻēK║¾ūRäe│÷šZ┴xŻ¼┴─╠ņÖCŲ„╚╦Ė∙ō■ė├æ¶Ą─šZę¶üĒ┴╦ĮŌė├æ¶Ą─ąĶŪ¾Ż¼
╚╗║¾═©▀^ų¬ūR▓ķįā─ŻēKüĒą╬│╔Ģ■įÆšZŠõŻ¼į┘═©▀^šZę¶╔·│╔─ŻēK╔·│╔šZę¶┼cė├æ¶▀MąąĮ╗ ┴„ĪŻįō┴─╠ņÖCŲ„Š▀ėąšZę¶ūRäe║═└ĒĮŌ─▄┴”Ż¼╦³─▄ē“┬ĀČ«ė├æ¶ųĖ┴ŅŻ¼┐╔ęįæ¬ė├ė┌īWąŻĪó╝ę ═źĪó┘e^Īó╣½╦ŠĪóÖCł÷Īó▄暊Īó┤aŅ^ĪóĢ■ūhĄ╚Ąž▀MąąĮ╠ė²Īó┴─╠ņĪóĢ■įÆĪóū╔įāĄ╚Ę■䚯╗╦³▀Ć┐╔ęį ×ķė├æ¶╠ß╣®ą¹é„ĮķĮBĪóüĒįLĮė┤²Īó▐k╩┬▓ķįāĪó╬─├žĘ■äšĪó═ŌšZĘŁūgĄ╚ĪŻ
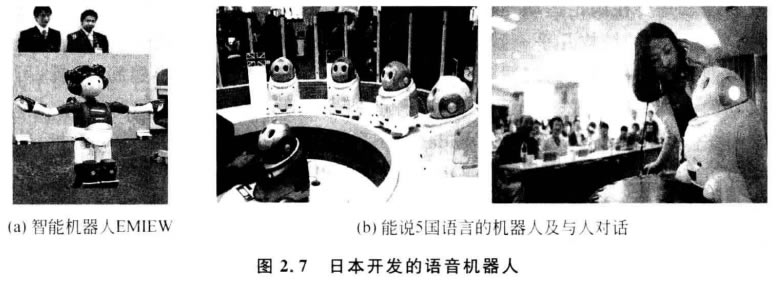
╚š▒Š╚š┴ó╣½╦Šę▓čąųŲ┴╦ę╗┼_ųŪ─▄ÖCŲ„╚╦EMIEW, ╦³Ą─éĆŅ^║═ąĪ║óę╗śėŻ¼ę└┐┐▌åūėęŲ äėŻ¼╚ńłD2.7(a)╦∙╩ŠĪŻė╔ė┌╔Ē╔ŽčbėąöĄ┤aŽÓÖC║═└ū▀_╠Į£yŲ„Ż¼╦³┐╔ęįūįäėĄžČŃ▒▄šŽĄK╬’ĪŻ ═¼Ģr╦³Ą─į~ģRā”éõ┴┐▀_ĄĮ100ČÓéĆŻ¼─▄ē“ī”ę╗ą®║åå╬Ą─┬Ģę¶ųĖ┴Ņū÷│÷Ę┤æ¬Ż¼▓óŪę▀Ć─▄ē“ ║═╚╦▀Mąą║åå╬Ą─ī”įÆĮ╗┴„Ż¼╔§ų┴▓źł¾╠ņÜŌŅAł¾Ą╚ĪŻĄ┌Č■┤· EMIEW2 ÖCŲ„╚╦┐╔ęį═©▀^¤o ŠĆļŖčbų├Įė╩šųĖ┴ŅŻ¼╚╗║¾║┴▓╗┘M┴”Ąžį┌▐k╣½╩ęų«ķgüĒ╗ž▒╝▓©Ż¼×ķ▐k╣½╩ę╚╦åT┼▄═╚ĪŻ╦³šŠ ┴óĢr╔ĒĖ▀┤¾╝s×ķ31.5ėó┤ńŻ¼¾wųž×ķ29░§ĪŻ╦³─▄ē“ī”šŽĄK╬’æ¬ĖČūį╚ńŻ¼ī”╚╦Ą─šZę¶ū÷│÷ ╗žæ¬Ż¼▓óŪęę╗┤╬│õļŖ║¾╝┤┐╔╣żū„1ąĪĢrĪŻ┤╦═ŌŻ¼─▄šf5ć°šZčįĄ─ÖCŲ„╚╦╝░┼c╚╦ī”įÆĄ─ÖC Ų„╚╦ę▓ęčĮøšQ╔·┴╦Ż¼╚ńłD2.7(b) ╦∙╩ŠĪŻį┌╬ęć°┼e▐kĄ─╚ššZč▌ųv┤¾┘ɼFł÷╔ŽŻ¼ģó╝ė▒╚┘ÉĄ─ ▀x╩ųęį╝░╚ššZį║ąŻĄ─īW╔·▓╗Ą½┼cįōÖCŲ„╚╦▀Mąą┴╦Į╗┴„╗źäėŻ¼Č°ŪęįōÖCŲ„╚╦▀Ć½I╔Ž┴╦įSČÓ Š½▓╩╬ĶĄĖ║═ĖĶŪ·ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


