
é„äėÖCśŗė├üĒ░č“īäėŲ„Ą─▀\äėé„▀fĄĮĻP╣Ø║═äėū„▓┐╬╗ĪŻÖCŲ„╚╦│Żė├Ą─é„äėÖCśŗėąĮzĖ▄é„äėÖCśŗĪó²X▌åé„äėÖCśŗĪó┬▌ą²é„äėÖCśŗĪóĦ╝░µ£é„äėĪó▀BŚU╝░═╣▌åé„äėĄ╚ĪŻ
ÖCŲ„╚╦é„äėė├Ą─ĮzĖ▄Š▀éõĮYśŗŠo£ÉĪóķgŽČąĪ║═é„äėą¦┬╩Ė▀Ą╚╠ž³cĪŻ
ØLųķĮzĖ▄Ą─ĮzĖ▄║═┬▌─Ėų«ķgčb┴╦║▄ČÓõōŪ“Ż¼ĮzĖ▄╗“┬▌─Ė▀\äėĢrõōŪ“▓╗öÓ裣hŻ¼▀\äėĄ├ęį é„▀fĪŻę“┤╦Ż¼╝┤╩╣ĮzĖ▄Ą─ī¦│╠ĮŪ║▄ąĪŻ¼ę▓─▄Ą├ĄĮ90%ęį╔ŽĄ─é„äėą¦┬╩ĪŻ
ØLųķĮzĖ▄┐╔ęį░čų▒ŠĆ▀\äė▐DōQ│╔╗ž▐D▀\äėŻ¼ę▓┐╔ęį░č╗ž▐D▀\äė▐DōQ│╔ų▒ŠĆ▀\äėĪŻØLųķĮz Ė▄░┤õōŪ“Ą─裣hĘĮ╩ĮĘų×ķõōŪ“╣▄═Ō裣hĘĮ╩ĮĪó┐┐┬▌─Ėā╚▓┐S ĀŅ▓█īŹ¼FõōŪ“裣hĄ─ā╚裣hĘĮ╩Į ║═┐┐┬▌─Ė╔Ž▓┐ī¦ę²░ÕīŹ¼FõōŪ“裣hĄ─ī¦ę²░ÕĘĮ╩Į
ęčĮøķ_░l┴╦ęįĖ▀▌d║╔║═Ė▀äéąį×ķ─┐Ą─Ą─ąąąŪ▌å ╩ĮĮzĖ▄ĪŻįōĮzĖ▄ČÓė├ė┌Š½├▄ÖC┤▓Ą─Ė▀╦┘▀MĮoŻ¼Å─Ė▀ ╦┘ąį║═Ė▀┐╔┐┐ąįüĒ┐┤Ż¼ę▓┐╔ė├į┌┤¾ą═ÖCŲ„╚╦Ą─é„ äėŻ¼ŲõįŁ└Ē╚ńłD2-17╦∙╩ŠĪŻ┬▌─Ė┼cĮzĖ▄▌Sų«ķgėą┼c ĮzĖ▄▌Sć¦║ŽĄ─ąąąŪ▌åŻ¼čbėą7Ī½8╠ūąąąŪ▌åĄ─ŽĄŚU ┐╔į┌┬▌─Ėā╚ūįė╔╗ž▐DŻ¼ąąąŪ▌åĄ─ųą▓┐ėą┼cĮzĖ▄▌Sć¦ ║ŽĄ─┬▌╝yŻ¼Ųõā╔é╚ėą┼cā╚²X▌åć¦║ŽĄ─²XĪŻīó┬▌─Ė╣╠ Č©Ż¼“īäėĮzĖ▄▌SŻ¼ąąąŪ▌å▒Ń▀ģūį▐D▀ģŽÓī”ė┌ā╚²X▌å ╣½▐DŻ¼▓ó╩╣ĮzĖ▄▌Sčž▌SŽ“ęŲäėĪŻąąąŪ▌å╩ĮĮzĖ▄Š▀ėą│ą▌d─▄┴”┤¾ĪóäéČ╚Ė▀║═╗ž▐DŠ½Č╚Ė▀Ą╚ā× ³cŻ¼ė╔ė┌▓╔ė├┴╦ąĪ┬▌ŠÓŻ¼ę“Č°ĮzĖ▄Č©╬╗Š½Č╚ę▓Ė▀ĪŻ
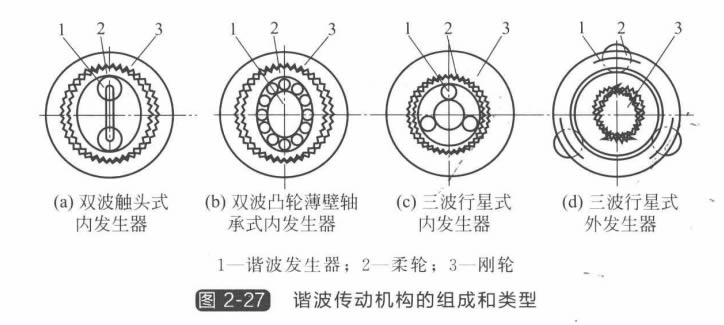
Ħ║═µ£é„äėė├ė┌é„▀fŲĮąą▌Sų«ķgĄ─╗ž▐D▀\äėŻ¼╗“░č╗ž▐D▀\äė▐DōQ│╔ų▒ŠĆ▀\äėĪŻÖCŲ„╚╦ųą Ą─Ħ║═µ£é„äėĘųäe═©▀^Ħ▌å╗“µ£▌åé„▀f╗ž▐D▀\äėŻ¼ėąĢr▀Ćė├üĒ“īäėŲĮąą▌Sų«ķgĄ─ąĪ²X▌åĪŻ
²Xą╬ĦĄ─é„äė├µ╔Žėą┼cĦ▌åć¦║ŽĄ─╠▌ą╬²XĪŻ²Xą╬Ħé„äėĢr¤o╗¼äėŻ¼│§ ╩╝Åł┴”ąĪŻ¼▒╗äė▌SĄ─▌S│ą▓╗ęū▀^▌dĪŻę“¤o╗¼äėŻ¼╦³│²┴╦ė├ū÷äė┴”é„äė═Ō▀Ć▀mė├ė┌Č©╬╗ĪŻ²Xą╬ Ħ▓╔ė├┬╚ČĪŽ─zū÷╗∙▓─Ż¼▓óį┌ųąķg╝ė╚ļ▓Ż┴¦└wŠSĄ╚╔ņ┐säéąį┤¾Ą─▓─┴ŽŻ¼²X├µ╔ŽĖ▓╔w─═─źąį║├ Ą──ß²ł▓╝ĪŻė├ė┌é„▀f▌p▌d║╔Ą─²Xą╬Ħ╩Ūė├Š█░▒╗∙╝ū╦ߧźųŲįņĄ─ĪŻ²XĄ─╣ØŠÓė├░³ĮjĦ▌åĄ─łA╣Ø ŠÓp üĒ▒Ē╩ŠŻ¼▒Ē╩ŠĘĮĘ©ėą─ŻöĄĘ©║═ėó┤ńĘ©ĪŻĖ„ĘN╣ØŠÓĄ─²Xą╬Ħėą▓╗═¼ęÄĖ±Ą─īÆČ╚║═ķLČ╚ĪŻ
²X▌å┐┐Š∙ä“Ęų▓╝į┌▌å▀ģ╔ŽĄ─²XĄ─ų▒ĮėĮėė|üĒé„▀f┴”ŠžĪŻ═©│ŻŻ¼²X▌åĄ─ĮŪ╦┘Č╚▒╚║═▌SĄ─ŽÓ ī”╬╗ų├Č╝╩Ū╣╠Č©Ą─ĪŻę“┤╦Ż¼▌å²XęįĮėė|ų∙├µ×ķ╣Ø├µŻ¼Ą╚ķgĖ¶ĄžĘų▓╝į┌łAų▄╔ŽĪŻļS▌SĄ─ŽÓī”╬╗ ų├║═▀\äėĘĮŽ“Ą─▓╗═¼Ż¼²X▌åėąČÓĘNŅÉą═
ųC▓©é„äėĄ─╠ž³c╩ŪĮYśŗ║åå╬Īó¾wĘeąĪĪóųž┴┐▌pĪóé„äėŠ½Č╚Ė▀Īó│ą▌d─▄┴”┤¾Īóé„äė▒╚┤¾Ż¼ŪęŠ▀ ėąĖ▀ūĶ─ß╠žąįĪŻĄ½╚ß▌åęūŲŻä┌Ż¼┼ż▐DäéČ╚Ą═Ż¼Ūęęū«a╔·š±äėĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



