
ÖCŲ„╚╦ĘųŅÉĘĮĘ©ėą║▄ČÓĘNĪŻ▀@└’Ž╚ĮķĮB╚²ĘNĘųŅÉĘ©Ż¼╝┤Ęųäe░┤ÖCąĄ╩ųĄ─Äū║╬ĮYśŗĪó ÖCŲ„╚╦Ą─┐žųŲĘĮ╩Įęį╝░ÖCŲ„╚╦┐žųŲŲ„Ą─ą┼Žó▌ö╚ļĘĮ╩ĮüĒĘųĪŻ
1. ░┤ÖCąĄ╩ųĄ─Äū║╬ĮYśŗüĒĘų
ÖCŲ„╚╦ÖCąĄ╩ųĄ─ÖCąĄ┼õų├ą╬╩ĮČÓĘNČÓśėĪŻZ│ŻęŖĄ─ĮYśŗą╬╩Į╩Ūė├Ųõū°ś╦╠žąįüĒ├Ķ╩÷ Ą─ĪŻ▀@ą®ū°ś╦ĮYśŗ░³└©Ąč┐©ā║ū°ś╦ĮYśŗĪóų∙├µū°ś╦ĮYśŗĪóJū°ś╦ĮYśŗĪóŪ“├µū°ś╦ĮYśŗ║═ĻP ╣Ø╩ĮŪ“├µū°ś╦ĮYśŗĄ╚ĪŻ▀@└’║åå╬ĮķĮB╚²ĘNZ│ŻęŖĄ─ų∙├µĪóŪ“├µ║═ĻP╣Ø╩ĮŪ“├µū°ś╦ĮYśŗÖC Ų„╚╦ĪŻ
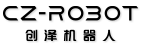
(1)ų∙├µū°ś╦ÖCŲ„╚╦
ų∙├µū°ś╦ÖCŲ„╚╦ų„ę¬ė╔┤╣ų▒ų∙ūėĪó ╦«ŲĮ╩ų▒█(╗“ÖCąĄ╩ų)║═Ąūū∙śŗ│╔ĪŻ╦«ŲĮ ÖCąĄ╩ųčbį┌┤╣ų▒ų∙ūė╔ŽŻ¼─▄ūįė╔╔ņ┐sŻ¼ ▓ó┐╔čž┤╣ų▒ų∙ūė╔ŽŽ┬▀\äėĪŻ┤╣ų▒ų∙ūė░▓ čbį┌Ąūū∙╔ŽŻ¼▓ó┼c╦«ŲĮÖCąĄ╩ųę╗Ų(ū„ ×ķ ę╗éĆ▓┐╝■)─▄į┌Ąūū∙╔ŽęŲäėĪŻ▀@śėŻ¼ ▀@ĘNÖCŲ„╚╦Ą─╣żū„░³█E(ģ^ķg)Š═ą╬│╔ę╗ Č╬łAų∙├µŻ¼╚ńłD1-4╦∙╩ŠĪŻę“┤╦Ż¼░č▀@ĘNÖCŲ„╚╦Įąū÷ų∙├µū°ś╦ÖCŲ„╚╦ĪŻ
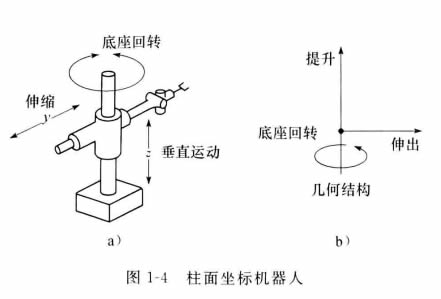
(2)Ū“├µū°ś╦ÖCŲ„╚╦
▀@ĘNÖCŲ„╚╦╚ńłD1-5╦∙╩ŠĪŻ╦³Ž±╠╣┐╦Ą─┼┌╦■ę╗śėŻ¼ÖCąĄ╩ų─▄ē“ū÷└’═Ō╔ņ┐sęŲäėĪóį┌┤╣ų▒ŲĮ├µ╔Ž┤╣ų▒╗ž▐Dęį╝░į┌╦«ŲĮŲĮ├µ╔Ž└@Ąūū∙ą²▐DĪŻę“┤╦Ż¼▀@ĘNÖCŲ„╚╦Ą─╣żū„░³█Eą╬│╔Ū“├µ Ą─ę╗▓┐ĘųŻ¼▓ó▒╗ĘQ×ķŪ“├µū°ś╦ÖCŲ„╚╦ĪŻ
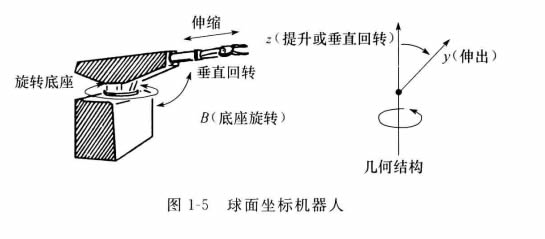
(3)ĻP╣Ø╩ĮŪ“├µū°ś╦ÖCŲ„╚╦
▀@ĘNÖCŲ„╚╦ų„ę¬ė╔Ąūū∙(╗“▄|Ė╔)Īó╔Ž▒█║═Ū░▒█śŗ│╔ĪŻ╔Ž▒█║═Ū░▒█┐╔į┌═©▀^Ąūū∙Ą─┤╣ų▒ŲĮ├µ╔Ž▀\äėŻ¼╚ńłD1-6╦∙╩ŠĪŻį┌Ū░▒█║═╔Ž▒█ķgŻ¼ÖCąĄ╩ųėąéĆųŌĻP╣ØŻ╗Č°į┌╔Ž▒█║═Ąūū∙ķgŻ¼ ėąéĆ╝ńĻP╣ØĪŻį┌╦«ŲĮŲĮ├µ╔ŽĄ─ą²▐D▀\äėŻ¼╝╚┐╔ ė╔╝ńĻP╣Ø▀MąąŻ¼ę▓┐╔ęį└@Ąūū∙ą²▐DüĒīŹ¼FĪŻ▀@ ĘNÖCŲ„╚╦Ą─╣żū„░³█Eą╬│╔Ū“├µĄ─┤¾▓┐ĘųŻ¼ĘQ×ķ ĻP╣Ø╩ĮŪ“├µÖCŲ„╚╦ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



