
╚╦ą╬ÖCŲ„╚╦ąĶꬊ▀éõGĘ║╗»─▄┴”┼c╦╝ŠSµ£─▄┴”ĪŻ┼c╣żśIÖCŲ„╚╦▓╗═¼,╚╦ą╬ÖCŲ„╚╦ąĶę¬┼cÅ═ļs╩└Įń▀Mąą╗źäė,ę“┤╦øQ▓▀┐žųŲŽĄĮyąĶ ę¬GĘ║╗»ąįĪŻį┌¼FīŹ╩└Įńųą,ÖCŲ„╚╦ļyęįę╗┤╬ąį═Ļ│╔š¹éĆÅ═ļsäėū„,ąĶę¬īóÅ═ļsäėū„▓ ĮŌ│╔ČÓéĆ║åå╬▓Į¾E═Ļ│╔ĪŻČ°ė╔ė┌¼FīŹ╩└Įń▀h▒╚ÖCŲ„╚╦ė¢ŠÜł÷Š░Å═ļs,į┌╚╬äš▀^│╠ųąĢ■╩▄ ĄĮĖ„ĘNĖ╔ö_,ŁhŠ│ę▓Ģ■▓╗öÓūā╗»,ę“┤╦Š▀╔ĒųŪ─▄ÖCŲ„╚╦ąĶę¬▌^ÅŖĄ─╦╝ŠSµ£─▄┴”ĪŻįńŲ┌╚╦ą╬ÖCŲ„╚╦┤¾─Xų„ę¬═©▀^╝»│╔ČÓéĆĪ░ąĪ─Żą═Ī▒ĮY║Ž╚╦╣żĮķ╚ļīŹ¼F,Ą½ļSų°GPT-40Ą╚┤¾─Ż ą═Ą─│÷¼F,ÖCŲ„╚╦ī”╬─▒ŠĪóęĢėXĪóšZčįĄ╚ČÓ─ŻæBą┼ŽóĄ─└ĒĮŌ║═▐D╗»’@ų°╠ß╔²,ų┬╩╣╚╦ą╬ÖCŲ„╚╦┤¾─XĄ─Ę║╗»─▄┴”┼c╦╝ŠS─▄┴”ęÓėą┤¾Ę∙į÷╝ėĪŻ
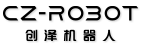
─┐Ū░ÖCŲ„╚╦┤¾─X░┤šš╝╝ągĘĮ░ĖäØĘų×ķVLM(┤¾─X+ąĪ─X)ĪóVLA(Č╦ĄĮČ╦)ā╔ĘN╝╝ąg┬Ę ÅĮĪŻ┤¾ąĪ─XīóÅ═ļsĄ─╚╬äšĘųĮŌ×ķGīėęÄäØ┼cĄūīėł╠ąąā╔éĆīėJ,Ęų×ķā╔éĆų„ę¬─ŻēK:
1) Gīė╚╬äšęÄäØŲ„(┬²─X)žōž¤šZ┴x└ĒĮŌĪó╚╬äšĘųĮŌ║═ķL│╠═Ų└Ē,╔·│╔╚╬äš▓Į¾EĪŻ
2)Ąūīė äėū„┐žųŲŲ„(┐ņ─X)ł╠ąąŠ▀¾wĄ─äėū„▓óīŹĢr▀Mąą┐žųŲ,īóGīėųĖ┴Ņ▐D×ķĻP╣ØĮŪČ╚Īó▄ē█E Ą╚Ą═ŠSČ╚┐žųŲą┼╠¢,Š▀éõGŅlĒææ¬Ą╚╠ž³cŻ¼ ╠’ė┌Č╦ĄĮČ╦ųĖ┴Ņ╔·│╔╦┘Č╚┬²Ż¼ ╔·│╔ĮY╣¹║åå╬,Č╠Ų┌╚į╚╗╩Ūę└┐┐┤¾─X+ąĪ─XŽĄĮyĘųäe═Ļ│╔øQ▓▀┼c┐žųŲ╚╬äšĪŻ
į┌Ī░╩ųč█─XĪ▒ģf═¼ųą,┤¾─XĄ─ū„ė├ų„ę¬╩Ūßśī”«öŪ░šZ┴xĪó╬─ūųĄ─└ĒĮŌūRäe│÷╚╬äš─┐ś╦, ▓óĮY║Ž▌ö╚ļĄ─łDŽ±ą┼Žó,į┌ŁhŠ│ųąūRäe│÷▓┘ū„ī”Ž¾,ė^▓ņ╠žš„ĪŻ═©▀^ī”ęĢėXĪó╬─ūųĄ─š¹║Ž└ĒĮŌ,┤¾─Xīóū÷│÷║Ž└ĒĄ─ųĖ┴Ņ╚╬äš═Ųī¦,▓ó╔·│╔ąĪ─XĄ─ł╠ąąųĖ┴Ņ,ų«║¾į┘╩Ūė╔ąĪ─Xł╠ ąą╩ųč█ś╦Č©Īó╩ų▒█+ņ`Ū╔╩ųĄ─▀\äė▄ē█EĪó╬╗ū╦ūź╚ĪĄ╚äėū„ĪŻę“┤╦╚╦ą╬ÖCŲ„╚╦┤¾─X▒Š┘|╔Ž ╩Ūę╗éĆĖ╔ā|JäeģóöĄ┴┐Ą─ČÓ─ŻæB┤¾─Żą═,╚╦ą╬ÖCŲ„╚╦Ėąų¬║═øQ▓▀─▄┴”╚ĪøQė┌ČÓ─ŻæB┤¾─Ż ą═Ą──▄┴”ĪŻ
─┐Ū░╚╦ą╬ÖCŲ„╚╦┤¾─X╚į╚╗ėąā×╗»┐šķgĪŻī”╚╦ą╬ÖCŲ„╚╦┤¾ąĪ─X═©ė├╗»īŹ¼F┬ĘÅĮ,─┐Ū░ųŪį¬ÖCŲ„╚╦ßśī”Š▀╔ĒųŪ─▄╝╝ągč▌▀M┬ĘŠĆ,▀MąąG1ų┴G5Ą─äØĘų,─┐Ū░ć°ā╚═Ō«aśI▀Mš╣╠Äė┌ G2-G3Ą─╦«ŲĮĪŻ
G1:é„Įyūįäė╗»Ą─Ų³c,Äū║§▓╗Š▀éõĘ║╗»─▄┴”;
G2:═©▀^╠ߤÆ┐╔Å═ė├įŁūė╝╝─▄,▓óęįŽÓī”═©ė├Ą─ĘĮ╩ĮüĒīŹ¼F,ĮY║Ž╚╬䚊Ä┼┼┤¾─Ż ą═,┐╔ęįŠ▀éõī”ę╗┤¾ŅÉŽÓ╦Ųł÷Š░Ą─Ę║╗»;
G3:ū▀Ž“öĄō■“īäėČ╦ĄĮČ╦,▀Mę╗▓Įą╬│╔ę╗╠ū═©ė├ė¢ŠÜ┐“╝▄,īW┴Ģą┬╝╝─▄═©▀^▓╔╝» ŽÓæ¬öĄō■Š═─▄īŹ¼FĖ³═©ė├┐ńŅÉäeĄ─Ę║╗»─▄┴”ĪŻ
G4:ļSų°öĄō■┴┐Ą─▀Mę╗▓Įį÷╝ė,G4īó▀Mę╗▓Įč▌╗»×ķę╗éĆ═©ė├Ą─▓┘ū„┤¾─Żą═,ĮY║Ž šJų¬═Ų└ĒęÄäØ┤¾─Żą═,üĒīŹ¼FČ╦ĄĮČ╦═©ė├▓┘ū„ĪŻ
G5:×ķķLŲ┌░lš╣─┐ś╦,ZĮKą╬│╔ę╗éĆšµš²Ą─Ėąų¬ĪóøQ▓▀Īół╠ąąĄ─Č╦ĄĮČ╦┤¾─Żą═ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



