
╔ŽŽ┬╬─╣▄└Ē╩Ūī”įÆ╩Į AI Ą─ėøæøųąśąŻ¼ąĶ═©▀^╝╝ągĘĮ░ĖŻ©RAGĪóĮYśŗ╗»ėøæøŻ®┼cā×╗»▓▀┬į Ż©ęŌłD▀^×VĪóäėæB▓├╝¶Ż®ĮŌøQ▀Bž×ąįĪó┘Yį┤Ž¹║─┼c£╩┤_ąįĄ─╚²ĮŪŲĮ║Ōå¢Ņ}ĪŻ
┬ĢŠWī”įÆ╩Į AI ę²Ūµ▓╔ė├Ą─ĘĮ░Ė╩Ū═©▀^ĮYśŗ╗»Č╠Ų┌ėøæø+äėæBķLŲ┌ėøæøūó╚ļŻ¼į┌▒ŻšŽ╝µ╚▌ąįĄ─═¼ĢrŻ¼ßśī”īŹĢršZę¶Į╗╗źł÷Š░Ż©ė╚ŲõųąöÓ╠Ä└ĒŻ®▀Mąą╔ŅČ╚ā×╗»Ż¼▓ó┘xėĶķ_░lš▀Ė▀Č╚ņ` ╗ŅĄ─╔ŽŽ┬╬─┐žųŲÖÓŽ▐ĪŻ
Č╠Ų┌ėøæøŻ©Short-term MemoryŻ®╩ŪųŪ─▄¾wį┌«öŪ░Ģ■įÆųą┼RĢr▒Ż┤µ║═╠Ä└ĒĄ─ą┼Žó┐šķgĪŻ ė├æ¶║═ī”įÆ╩ĮųŪ─▄¾w╗źäėŲ┌ķgŻ¼ųŪ─▄¾wĢ■į┌Č╠Ų┌ėøæøųąŠÅ┤µ«öŪ░ī”įÆĄ─╔ŽŽ┬╬─Ż¼┤_▒ŻųŪ─▄¾w ─▄ē“▀Bž×Ąž└ĒĮŌ║═╗žæ¬ė├æ¶Ą─▀B└m▌ö╚ļĪŻ
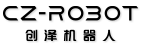
ī”įÆ╩Į AI ę²Ūµš¹¾wČ╠Ų┌ėøæøĢ■ęį JSON Ą─ą╬╩Į┤µā”Ż¼ū±čŁ OpenAI Chat Completions Ą─ęÄätŻ¼═¼Ģr▀Mąą┴╦▓┐ĘųĄ─öUš╣ĪŻ
Ī¾ ųŪ─▄¾w▀\ąąŲ┌ķgŻ¼š{ė├ GET ½@╚ĪųŪ─▄¾wČ╠Ų┌ėøæøĮė┐┌½@╚ĪČ╠Ų┌ėøæø JSONĪŻįōĮė ┐┌Ģ■Ą├ĄĮųŪ─▄¾w╔·├³ų▄Ų┌ā╚ā”┤µĄ─═Ļš¹Ą─Č╠Ų┌ėøæøĪŻ
Ī¾ ųŪ─▄¾w═Żų╣║¾Ż¼┬ĢŠWĢ■═©▀^Ž¹Žó═©ų¬Ę■äšīóČ╠Ų┌ėøæø╗žš{ų┴─ŃĄ─śIäšĘ■äšŲ„Ż¼įöęŖ Ž¹Žó═©ų¬╩┬╝■ŅÉą═ĪŻ
ųŪ─▄¾wĄ─Č╠Ų┌ėøæøĢ■ļSųŪ─▄¾w═Żų╣Č°Ž¹╩¦Ż¼─Ń┐╔ęįį┌ųŪ─▄¾w═Żų╣║¾Ż¼īóČ╠Ų┌ėøæøā”┤µĄĮ ─ŃĄ─Ę■äšŲ„ęį╣╠╗»×ķķLŲ┌ėøæøŻ¼ų«║¾į┌äōĮ©ųŪ─▄¾wĢr═©▀^ llm.system_messages ų▒Įėūó╚ļ įŁ╩╝ėøæøā╚╚▌╗“Įø▀^┐éĮYĄ─ėøæøā╚╚▌Ż¼Å─Č°īŹ¼Fį┌ųŪ─▄¾w═╦│÷╗“ųžåó║¾╚į╚╗─▄ē“įLå¢║═╩╣ė├ ▀@ą®öĄō■ĪŻ
ęįŽ┬╩Š└²š╣╩Š┴╦═©▀^ system_messages ūó╚ļĮø▀^┐éĮYĄ─ėøæøā╚╚▌Ż║
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



