
ūįė╔Č╚╩ŪÖCŲ„╚╦Ą─ę╗éĆųžę¬╝╝ągųĖś╦Ż¼╦³╩Ūė╔ÖCŲ„╚╦Ą─ĮYśŗøQČ©Ą─Ż¼▓óų▒Įėė░ĒæĄĮÖCŲ„╚╦Ą─ÖCäėąįĪŻ
1. äé¾wĄ─ūįė╔Č╚
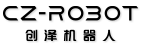
╬’¾w╔Ž╚╬║╬ę╗³cČ╝┼cū°ś╦▌SĄ─š²Į╗╝»║Žėą ĻPĪŻ╬’¾w─▄ē“ī”ū°ś╦ŽĄ▀Mąąd┴ó▀\äėĄ─öĄ─┐ĘQ×ķ ūįė╔Č╚(Degree of Freedom,DOF)ĪŻ╬’¾w╦∙─▄ ▀MąąĄ─▀\äė░³└©(ęŖłD1-3):
čžų°ū°ś╦▌Sox Īóoy ║═oz Ą─╚²éĆŲĮęŲ▀\äėT₁ ĪóT₂ ║═ T₃;
└@ų°ū°ś╦▌Sox Īó0y ║═oz Ą─╚²éĆą²▐D▀\äėR₁ ĪóR2 ║═R₃ĪŻ
▀@ęŌ╬Čų°╬’¾w─▄ē“▀\ė├╚²éĆŲĮęŲ║═╚²éĆą²▐DŻ¼ŽÓī”ė┌ū°ś╦ŽĄ▀MąąČ©Ž“║═▀\äėĪŻ
ę╗éĆ║åå╬╬’¾wėą┴∙éĆūįė╔Č╚ĪŻ«öā╔éĆ╬’¾wķg┤_┴óŲ─│ĘNĻPŽĄĢrŻ¼├┐ę╗╬’¾wŠ═ī”┴Ēę╗╬’ ¾w╩¦╚źę╗ą®ūįė╔Č╚ĪŻ▀@ĘNĻPŽĄę▓┐╔ęįė├ā╔╬’¾wķgė╔ė┌Į©┴ó▀BĮėĻPŽĄČ°▓╗─▄▀MąąĄ─ęŲäė╗“▐D äėüĒ▒Ē╩ŠĪŻ
2. ÖCŲ„╚╦Ą─ūįė╔Č╚
╚╦éāŲ┌═¹ÖCŲ„╚╦─▄ē“ęį£╩┤_Ą─ĘĮ╬╗░č╦³Ą──®Č╦ł╠ąąčbų├╗“┼c╦³▀BĮėĄ─╣żŠ▀ęŲäėĄĮĮoČ© ³cĪŻ╚ń╣¹ÖCŲ„╚╦Ą─ė├═Š╩Ū╬┤ų¬Ą─Ż¼─Ū├┤╦³æ¬«öŠ▀ėą┴∙éĆūįė╔Č╚ĪŻ▓╗▀^Ż¼╚ń╣¹╣żŠ▀▒Š╔ĒŠ▀ėą ─│ĘN╠žäeĮYśŗŻ¼─Ū├┤Š═┐╔─▄▓╗ąĶę¬┴∙éĆūįė╔Č╚ĪŻ└²╚ńŻ¼ę¬░čę╗éĆŪ“Ę┼ĄĮ┐šķg─│éĆĮoČ©╬╗ ų├Ż¼ėą╚²éĆūįė╔Č╚Š═ūŃē“┴╦ĪŻ
ę╗░ŃŪķørŽ┬Ż¼ÖCŲ„╚╦ÖCąĄ╩ųĄ─╩ų▒█Š▀ėą╚²éĆūįė╔Č╚Ż¼Ųõ╦¹Ą─ūįė╔Č╚öĄ×ķ─®Č╦ł╠ąąčbų├╦∙Š▀ėąĪŻ«öę¬Ū¾─│ę╗ÖCŲ„╚╦Ń@┐ūĢrŻ¼ŲõŃ@Ņ^ąĶę¬▐DäėĪŻ▓╗▀^Ż¼▀@ę╗▐Däė┐é╩Ūė╔═Ō▓┐Ą─±R▀_ ĦäėĄ─Ż¼ę“┤╦Ż¼▓╗░č╦³┐┤ū„ÖCŲ„╚╦Ą─ę╗éĆūįė╔Č╚ĪŻ▀@═¼śė▀mė├ė┌ÖCŲ„╚╦Ą─ÖCąĄ╩ųĪŻÖCąĄ╩ų Ą─ŖA╩ųæ¬─▄ķ_ķ]ĪŻ▓╗▀^Ż¼ę▓▓╗─▄░čŖA╩ųĄ─▀@éĆķ_ķ]╦∙ė├Ą─ūįė╔Č╚«öū„ÖCŲ„╚╦Ą─ūįė╔Č╚ų« ę╗Ż¼ę“×ķ▀@éĆūįė╔Č╚ų╗ī”ŖA╩ųĄ─▓┘ū„Ųū„ė├ĪŻ▀@ę╗³c╩Ū║▄ųžę¬Ą─Ż¼ąĶę¬ėøūĪĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



