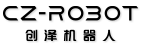
ī”ė┌ę╗éĆŠ▀ėąĖ▀Č╚ųŪ─▄Ą─ÖCŲ„╚╦Ż¼╦³Ą─┐žųŲŽĄĮyīŹļH╔Ž░³║¼┴╦Ī░╚╬äšęÄäØĪ▒ Ī░äėū„ęÄäØĪ▒Ī░▄ē█EęÄäØĪ▒║═╗∙ė┌─Żą═Ą─ Ī░╦┼Ę■┐žųŲĪ▒Ą╚ČÓéĆīė┤╬Ż¼╚ńłD1-7╦∙╩ŠĪŻ ÖCŲ„╚╦Ž╚ę¬═©▀^╚╦ÖCĮė┐┌½@╚Ī▓┘ū„š▀Ą─ ųĖ┴ŅŻ¼ųĖ┴ŅĄ─ą╬╩Į┐╔ęį╩Ū╚╦Ą─ūį╚╗šZčįŻ¼ ╗“š▀╩Ūė╔╚╦░l│÷Ą─īŻė├Ą─ųĖ┴ŅšZčįŻ¼ę▓┐╔ ęį╩Ū═©▀^╩ŠĮ╠╣żŠ▀▌ö╚ļĄ─╩ŠĮ╠ųĖ┴ŅŻ¼╗“š▀ µI▒P▌ö╚ļĄ─ÖCŲ„╚╦ųĖ┴ŅšZčįęį╝░ėŗ╦ŃÖC│╠
ą“ųĖ┴ŅĪŻÖCŲ„╚╦Ųõ┤╬ę¬ī”┐žųŲ├³┴Ņ▀MąąĮŌßī└ĒĮŌŻ¼░č▓┘ū„š▀Ą─├³┴ŅĘųĮŌ×ķÖCŲ„╚╦┐╔ęįīŹ¼FĄ─ Ī░╚╬äšĪ▒,▀@╩Ū╚╬äšęÄäØĪŻ╚╗║¾ÖCŲ„╚╦ßśī”Ė„éĆ╚╬äš▀Mąąäėū„ĘųĮŌŻ¼▀@╩Ūäėū„ęÄäØĪŻ×ķ┴╦īŹ¼FÖCŲ„╚╦Ą─ę╗ŽĄ┴ąäėū„Ż¼æ¬įōī”ÖCŲ„╚╦├┐éĆĻP╣ØĄ─▀\äė▀MąąįOėŗŻ¼╝┤ÖCŲ„╚╦Ą─▄ē█EęÄäØĪŻZĄū īė╩ŪĻP╣Ø▀\äėĄ─╦┼Ę■┐žųŲ
┐žųŲŽĄĮyĄ─╚╬äš╩ŪĖ∙ō■ÖCŲ„╚╦Ą─ū„śIųĖ┴Ņęį╝░Å─é„ĖąŲ„Ę┤ü╗žüĒĄ─ą┼╠¢Ż¼ų¦┼õÖCŲ„╚╦Ą─ł╠ąąÖCśŗ╚ź═Ļ│╔ęÄČ©Ą─▀\äė║═╣”─▄ĪŻ╚ń╣¹ ÖCŲ„╚╦▓╗Š▀éõą┼ŽóĘ┤ü╠žš„Ż¼ät×ķķ_Łh┐ž ųŲŽĄĮyŻ╗Š▀éõą┼ŽóĘ┤ü╠žš„Ż¼ät×ķķ]Łh┐ž ųŲŽĄĮyĪŻĖ∙ō■┐žųŲįŁ└Ē┐╔Ęų×ķ│╠ą“┐žųŲŽĄ ĮyĪó▀mæ¬ąį┐žųŲŽĄĮy║═╚╦╣żųŪ─▄┐žųŲŽĄ ĮyĪŻĖ∙ō■┐žųŲ▀\äėĄ─ą╬╩Į┐╔Ęų×ķ³c╬╗┐žųŲ ║═▀B└m▄ē█E┐žųŲĪŻ
╦┼Ę■ļŖÖCĄ─▐Däė╦┘Č╚Īó┼żŠžĪóĘ┤üą┼╠¢Ņl┬╩║═Ņ~Č©ļŖē║Ą╚ģóöĄ╩Ūš¹éĆÖCŲ„╚╦┐žųŲŽĄĮyĄ─øQČ©ąįę“╦žų«ę╗;£p╦┘ÖC║═£p╦┘²X▌åĮĄĄ═ļŖÖCĄ─▐Däė╦┘Č╚,╝ė┤¾▌ö│÷┼żŠž
├┐éĆĻP╣ØČ╝╩Ūė░ĒæųŪ─▄Įė┤²ųŪ─▄Įė┤²ÖCŲ„╚╦š¹¾w▀\äėĀŅæBĄ─ę“ūėŻ¼╦∙ęįįOėŗĢr▒žĒÜ┐╝æ]╚½¾wĄ─▀\äė╠žąįŻ¼▓óī”ĻP╣ØĄ─▀\äėĘČć·║═▀\äė╦┘Č╚ūā╗»ū÷│÷╝s╩°ĪŻ
×ķęÄäØųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦Ą─ÖCśŗįOėŗąĶŪ¾Ż¼ėŗ╦ŃÖCŲ„╚╦▀\äė▀^│╠ųąĖ„ĻP╣Ø╦∙╩▄Ą─┴”║═┴”ŠžĪóĘų╬÷äė┴”īWĘĆČ©ąį║═┐žųŲęÄ┬╔Ż¼▒žĒÜĮ©┴óŲõäė┴”īW─Żą═
┤«ąą┐žųŲĮYśŗ╩ŪųĖÖCŲ„╚╦Ą─┐žųŲ╦ŃĘ©╩Ūė╔┤«ąąėŗ╦ŃÖCüĒ╠Ä└Ē;▓óąą╠Ä└ĒĮYśŗ─▄ØMūŃÖCŲ„╚╦┐žųŲĄ─īŹĢrąįę¬Ū¾,īŹ¼FÅ═ļsĄ─ėŗ╦Ń┴”ŠžĘ©ĪóĘŪŠĆąįŪ░üĘ©Īóūį▀mæ¬┐žųŲĘ©
▀\äė┐žųŲŽĄĮyė╔═©ą┼─ŻēKĪóļŖį┤─ŻēKĪó┐žųŲ─ŻēK║═ļŖÖC“īäė─ŻēKĮM│╔;Ęųäe“īäė3éĆ╚½ĘĮ╬╗▌åŻ¼īŹ¼F3▌S┬ōäė;═©▀^ķ]Łh▓╔╝»ĄĮĄ─ļŖÖC┤a▒Pą┼Žó½@Ą├Ą─3éĆ▌åūėĄ─╦┘Č╚Ę┤ü╗žPC ÖC
ė▓╝■┐“łD░³└©ę╗éĆęįTMS320F2812DSP ×ķ║╦ą─Ą─DSP ┐žųŲ░ÕŻ¼ę╗ēK┼õ╠ūĄ─╣”┬╩“īäė░Õ║═ę╗┼_¤o╦óų▒┴„ļŖÖCŻ╗╣”┬╩“īäė▓┐ĘųĄ─ė▓╝■ļŖ┬ĘŻ¼ų„ę¬ė╔Ū░ų├“īäėąŠŲ¼║═┴∙éĆ╣”┬╩MOSEFET ╣▄ĮM│╔
ė├üĒÖz£yÖCŲ„╚╦Ą─╝ė╦┘Č╚,└©╔Ē¾wĄ─╝ė╦┘Č╚║═Ė„ĻP╣ØĮŪ╝ė╦┘Č╚,ėąĢr║“ę▓ū„×ķęųųŲĖ„ĻP╣ØÖCąĄš±äėČ°Öz£y;Ė∙ō■įŁ└Ē┐╔Ęų×ķæ¬ūā╩ĮĪóē║ļŖ╩Į║═MEMS ╝╝ągĄ╚
Öz£yÖCŲ„╚╦▀\äė╦┘Č╚,░³└©╔Ē¾węŲäė╦┘Č╚║═Ė„ĻP╣Ø▐Däė╦┘Č╚Ą╚;ę╗░Ń┐╔Ęų×ķų▒┴„╩Į║═Į╗┴„╩Įā╔ĘN,ų▒┴„╩Į£y╦┘ÖCĄ─äŅ┤┼ĘĮ╩Į┐╔Ęų×ķ╦¹äŅ╩Į║═ė└┤┼╩Įā╔ĘN,ėąÄ¦▓█Ą─Īó┐šą─Ą─Īó▒P╩ĮėĪ╦óļŖ┬ĘĄ╚ą╬╩Į
ė├ė┌ÖCŲ„╚╦▀\äėĻP╣ØĄ─┴Ń╬╗║═śOŽ▐╬╗ų├Ą─Öz£y,┴Ń╬╗╩ŪÖCŲ„╚╦ĻP╣Ø▀\äėķ_╩╝ĢrĄ─╬╗ų├,┴Ń╬╗Öz£yŠ½Č╚ų▒Įėė░ĒæÖCŲ„╚╦▀\äėĄ─Š½┤_Č╚;╬╗ęŲé„ĖąŲ„ę╗░ŃČ╝░▓čbį┌ÖCŲ„╚╦Ą─ĻP╣Ø╔ŽŻ¼ė├üĒÖz£yÖCŲ„╚╦Ė„ĻP╣ØĄ─╬╗ęŲ┴┐
┤¾▓┐Ęų▌åūė╩Ūė╔┐╔ūāą╬▓─┴Ž(╚ńŽ─z)ųŲ│╔Ż¼╦∙ęįŽÓ╗źū„ė├╩ŪĮėė|├µ;Ż¼╝┘įO╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦ųžą─▓╗Ė▀Ż¼ę“┤╦«öÖCŲ„╚╦╝ė╦┘▀\äėĢrė╔ųžą─Ų½Ė▀«a╔·Ą─Ė„▌åī”Ąžē║┴”Ą─ūā╗»║÷┬į▓╗ėŗ
ÖCŲ„╚╦ŽĄĮyĄ─ę¬Ū¾┤_Č©║¾Ż¼╩ūŽ╚ę¬┐╝æ]Ą─╩Ū▀xō±ČÓ┤¾Ą─ļŖÖC║Ž▀mŻ¼ų„ę¬┐╝ æ]žō▌dĄ─╬’└Ē╠žąįŻ¼░³└©žō▌d┼żŠžĪóæT┴┐Ą╚ĪŻį┌╦┼Ę■ļŖÖCųąŻ¼═©│Żęį┼żŠž╗“š▀┴”üĒ ║Ō┴┐ļŖÖC┤¾ąĪ
╚½ĘĮ╬╗ęŲäėÖCśŗÅ─«öŪ░╬╗ų├─▄ē“Ž“╚╬ęŌĘĮŽ“▀\äėŻ¼Č°▓╗ąĶę¬ÖCŲ„╚╦Ė─ūāū╦æB;į┌ąĶꬊ½┤_Č©╬╗║═Ė▀Š½Č╚▄ē█EĖ·█ÖĄ─Ģr║“ę▓ę¬Ū¾▀\äėÖCśŗŠ▀éõ╚½ĘĮ╬╗ęŲäėĄ──▄┴”