
Š▀ėąé„Įy(t©»ng)▄ć▌åĄ─ÖCŲ„╚╦ų╗─▄ėąā╔éĆūįė╔Č╚Ą─▀\äėŻ¼╦∙ęįį┌▀\äėīW╔ŽŻ¼╦³Ą╚ārė┌ é„Įy(t©»ng)Ą─Ļæ╔Ž▄ć▌vĪŻ╚╗Č°Ż¼Š▀ėą╚½ĘĮ╬╗▌åĄ─ÖCŲ„╚╦ėą3éĆūįė╔Č╚▀\äėĄ──▄┴”Ż¼╝┤čžų° ŲĮ├µ╔Žx ▌SĪóy ▌Sęį╝░└@ūį╔Ēųąą─ą²▐D(zhu©Żn)Ą─▀\äė─▄┴”Ż¼▀@│õĘųį÷╝ė┴╦ÖCŲ„╚╦Ą─ÖCäė ąįĪŻ▒Š╣Ø(ji©”)īóĮo│÷▀@ĘN╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦Ą─▀\äėīW─Żą═ĪŻ

╚½ĘĮ╬╗▌åĘNŅÉ║▄ČÓŻ¼▒Š╣Ø(ji©”)ęįłD3-1-4ųą╦∙╩ŠĄ─╚½ĘĮ ╬╗▌å×ķ└²▀MąąėæšōŻ¼╦³Ą─ĮM│╔╩Ūį┌▌å▌ץ─═ŌŠē╔ŽįO(sh©©)ų├ėą ┐╔└@ūį╝║Ą─▌Są²▐D(zhu©Żn)Ą─▌üūėŻ¼ŪęŠ∙ä“Ęų▓╝ė┌▌å▌×ų▄ć·Ż¼▀@ ą®▌üūė▌SŠĆ(E) ║═▌å▌×▌SŠĆ(S,) Ą─ŖAĮŪa ×ķ90ĪŃĪŻįō¹£ ┐©╝{─Ę▌åė╔ļp┼┼ūįė╔ØLäėĄ─▌üūėĮM│╔Ż¼╩╣Ą├▌åūėį┌Ąž├µ ØLäėĢrą╬│╔▀B└m(x©┤)Ą─Įėė|³cĪŻČ°į┌▀\äėĢr▌å▌×╩Ū“ī(q©▒)äėÖC śŗ(g©░u)Ż¼▌üūė╩ŪÅ─äėÖCśŗ(g©░u)Ż¼ę“┤╦į┌▒Š╣Ø(ji©”)ųąų„äė▌åė╔łD3-1-5 ╦∙╩Š▄ć▌å▌å▌×┼c▀ģčž▌üūėĮM│╔Ż¼Å─äė▌å×ķ▄ć▌å▌üūėŻ¼ų„ äė▌åĪóÅ─äė▌å┼cĄž├µĮėė|³cŠ∙×ķ▌üūė┼cĄž├µĄ─Įėė|³cĪŻ
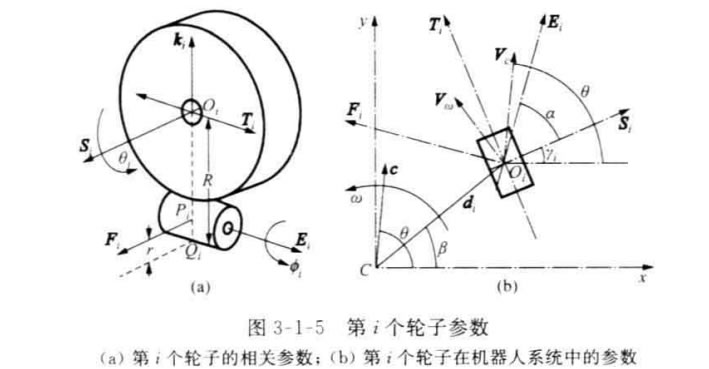
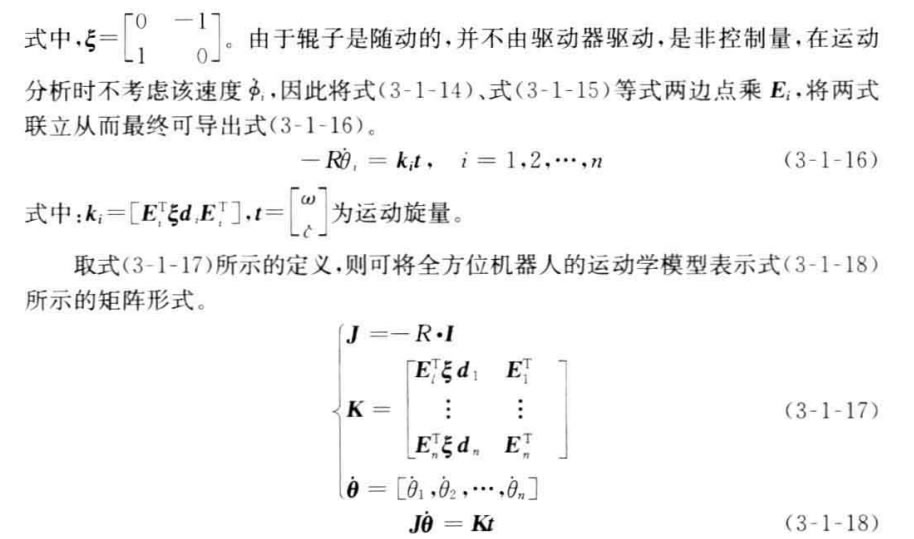
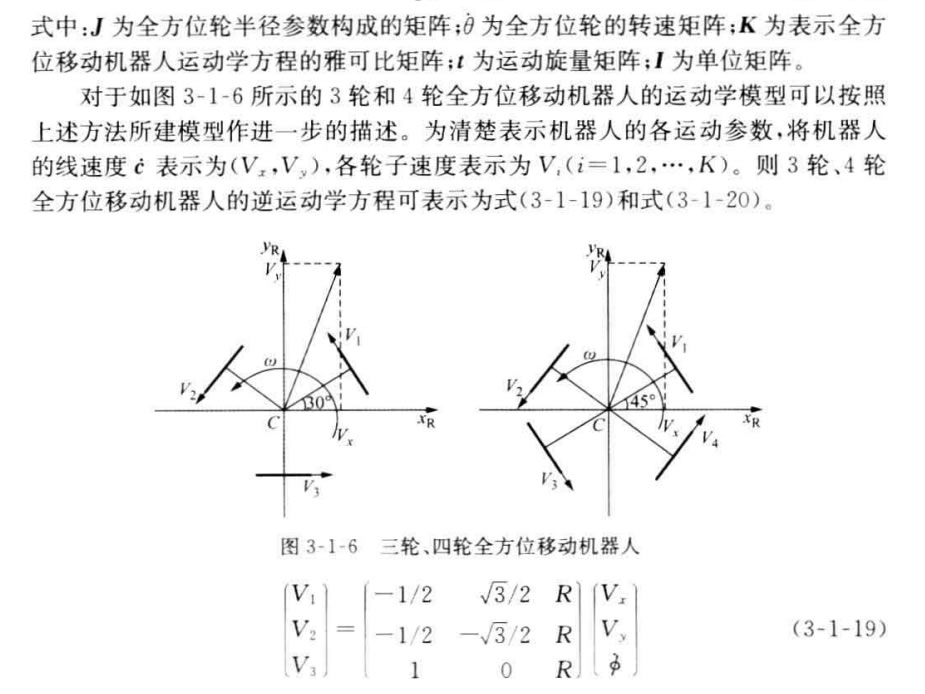
ė╔ė┌╚½ĘĮ╬╗▌åĄ─ĮY(ji©”)śŗ(g©░u)╠ž╩ŌąįŻ¼╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦┐╔ęįė╔▓╗═¼öĄ(sh©┤)┴┐Ą─╚½ĘĮ╬╗▌åĮM│╔Ż¼└Ēšō╔Žšf┐╔ęįė╔┤¾ė┌2Ą─╚╬ęŌéĆ▌åūėĮM│╔Ż¼Ą½Å─┐╔┐žąįęį╝░Įø(j©®ng)Ø·ąįĘĮ├µ┐╝ æ]Ż¼│ŻęŖĄ─ėą3▌åĪó4▌åĮM│╔ĪŻė╔▓╗═¼öĄ(sh©┤)┴┐(K) éĆ╚½ĘĮ╬╗▌åĮM│╔Ą─╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦ ėąų°▓╗═¼Ą─▀\äėąį─▄Ż¼K(KĪ▌3) įĮ┤¾Ż¼š±äėįĮąĪŻ╗Ą½═¼ĢrĦüĒ┴╦įSČÓÖCśŗ(g©░u)╔ŽĄ─å¢Ņ}Ż¼▒╚ ╚ńį┌▓╗ŲĮĄž├µ╔Ž▀\äėŻ¼«öKĪ▌4 ĢrąĶę¬╝ėÅŚąįæę╝▄ÖCśŗ(g©░u)üĒ▒ŻūC├┐éĆ▌åūėČ╝┼cĄž├µĮė ė|ĪŻ╚ń║╬▀x╚Ī║Ž▀mĄ─K ųĄęį½@Ą├ąĶꬥ─▀\äėąį─▄Ż¼ąĶę¬ī”ÖCŲ„╚╦▀Mąą▀\äėīWĮ©─ŻĪŻ
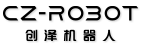
įO(sh©©)╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦ė╔K éĆ╚½ĘĮ╬╗▌åęįę╗Č©Ą─ĮŪČ╚░▓čbė┌▒Š¾w╔ŽŻ¼łD3-1-5(a)
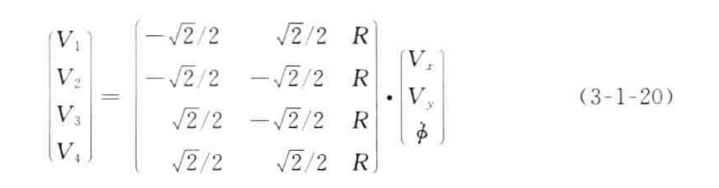
╦∙╩Š×ķÖCŲ„╚╦Ą┌Ż╗éĆ▌åūėĄ─ŽÓĻP(gu©Īn)ģóöĄ(sh©┤)Ż¼ŲõųąŻ¼S, ║═E, Ęųäe▒Ē╩Š▌å▌×║═▌üūė▐D(zhu©Żn)╦┘Ą─ žōĘĮŽ“Ż╗T, ║═F, Ęųäe▒Ē╩Š▌å▌×║═▌üūėųąą─Ą─ŠĆ╦┘Č╚š²ĘĮŽ“Ż╗k, ▒Ē╩ŠĮø(j©®ng)▀^▌åūėųąą─ ┤╣ų▒ė┌Ąž├µĄ─ĘĮŽ“Ż╗O, ×ķĄ┌i éĆ▌åūėĄ─ųąą─Ż╗P, ×ķ▌üūėĄ─ųąą─Ż╗Q ×ķ▌üūė(╗“▄ć▌å) ┼cĄž├µĄ─Įėė|³cŻ╗”╚║═ Īė,Ęųäe▒Ē╩Šų„äė▌å║═Å─äė▌åĄ─▐D(zhu©Żn)╦┘Ż╗R ▒Ē╩Š▌åūė▌Są─ĄĮĮėė| Ąž├µĄ─ŠÓļxŻ¼ę▓╝┤╚½ĘĮ╬╗▌åĄ─░ļÅĮŻ╗r ×ķÅ─äė▌åĄ─░ļÅĮĪŻ
į┌▓╗┐╝æ]▀\äėąį─▄Ą─ŪķørŽ┬Ż¼╚½ĘĮ╬╗▌å┐╔ęįęį╚╬ęŌĮŪČ╚░▓čbį┌ÖCŲ„╚╦▒Š¾w╔ŽŻ¼ łD3-1-5(b) ╦∙╩ŠĪŻŲõųąŻ¼ÖCŲ„╚╦ųąą─C ĄĮ▌åūėųąą─O. Ą─╩Ė┴┐×ķd.,d, ┼c x ▌SĄ─ŖA ĮŪ×ķ”┬.▌å▌×▐D(zhu©Żn)╦┘žōĘĮŽ“S, ┼cr ▌SŖAĮŪ×ķ”├,ĪŻęį╔ŽĖ„ģóöĄ(sh©┤)┤_Č©║¾Ż¼╚½ĘĮ╬╗▌åĄ─░▓čb ĘĮ╩Į▒Ń┐╔ęį┤_Č©ĪŻ

 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äš(w©┤)ÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



