┐vė^╚╦ą╬ÖCŲ„╚╦Ą─░lš╣Ż¼ų„ę¬╝»ųąį┌╚š▒Š║═ÜW├└Ż¼ė╚Ųõ╩Ū├└ć°Ż¼▓©╩┐ŅDäė┴”Atlas╩Ū─┐Ū░▀\äė┐žųŲ╝╝ągÅŖĄ─«aŲĘ;├¶Į▌ÖCŲ„╚╦╣½╦ŠĄ─Digit╩Ū─┐Ū░
éĆėą╔╠śI╗»┬õĄžĄ─╚╦ą╬ÖCŲ„╚╦Ż¼┼cūįäė±{±é▄ć▌vę╗Ų═Ļ│╔┐ņ▀f░³╣³Ą─Į╗ĖČŻ¼Č°╠ž╦╣└ŁĄ─Ūµ╠ņų∙╩Ū─┐Ū░▒╗ūu×ķŠ▀╩ął÷░lš╣Øō┴”Ą─«aŲĘĪŻ
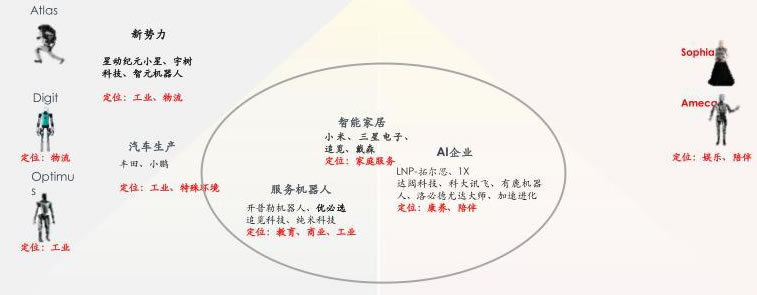
╚╦ą╬ÖCŲ„╚╦«aŲĘĘųā╔┤¾ĻćĀI:¾w─▄ą═║═ųŪ─▄ą═Ż¼Š█Į╣ā╔┤¾╔╠śI╗»┬õĄžł÷Š░Ą─ĘĮŽ“Ż╗
¾w─▄ą═ęį├└ć°▓©╩┐ŅDäė┴”Ą─AtlasĪó AgilityĄ─DigitĪó╠ž╦╣└ŁOptimus×ķ┤·▒Ē;ųŪ─▄ą═ęįŽŃĖ█Hanson RoboticsĄ─Sophiaęį╝░ėóć°Engineered ArtsĄ─Ameca×ķ┤·▒Ē;
Å─╔╠śI╗»Č©╬╗╔ŽüĒ┐┤¾w─▄ą═«aŲĘĖ³Ų½Ž“ųŲįņśI╝░╬’┴„Lė“Ą─┬õĄžł÷Š░Ż¼Č°╝ę═źĪó┐ĄBŅÉĄ─╚╦ą╬ÖCŲ„╚╦ät╝µŠ▀▀\äė╝░ųŪ─▄ĪŻ
└ÕŪÕŠ▀╔ĒųŪ─▄Ą─Ė┼─Ņā╚║ŁĪóč▌▀MÜv│╠Īó╝╝ąg¾wŽĄŻ¼═©▀^╩ß└Ē«öŪ░Š▀╔ĒųŪ─▄╝╝ąg░lš╣¼FĀŅŻ¼čą┼ąĘų╬÷ Š▀╔ĒųŪ─▄æ¬ė├Øō┴”┼c┐╔─▄ė░ĒæŻ¼╠ß│÷├µ┼RĄ─å¢Ņ}╠¶æŻ¼š╣═¹╦╝ŠSųŪ ─▄║═ąąäėųŪ─▄╚┌║ŽĄ─╬┤üĒ░lš╣┌ģä▌
═©▀^ī”Ī░ßtĪ▒ĪóĪ░╩│Ī▒Īó Ī░ūĪĪ▒ĪóĪ░ąąĪ▒ĪóĪ░│Ū╩ąĪ▒ĪóĪ░Ų¾śIĪ▒ĪóĪ░─▄į┤Ī▒ĪóĪ░öĄūų┐╔ą┼Ī▒░╦éĆŠSČ╚į┌Ž┬ę╗éĆ╩«─ĻĄ─š╣═¹Ż¼üĒćLįć ├Ķ└LųŪ─▄╩└Įń 2030 Ą─├└║├łDŠ░Ż¼ųŪ─▄ ╩└ĮńōĒėą¤oŽ▐┐╔─▄
ąįĻPµI╝╝ąg║═æ¬ė├ķ_░lŅÉėŗäØĒŚ─┐ą╬│╔ ś╦£╩│╔╣¹Ą─▒╚└²▀_ĄĮ 60Żźęį╔Ž,ś╦£╩┼c«aśI┐Ų╝╝äōą┬Ą─┬ō äė╦«ŲĮ│ų└m╠ß╔²,ą┬ųŲČ©ć°╝ęś╦£╩║═ąąśIś╦£╩50 ĒŚęį╔Ž
╚╦ą╬╩ął÷ī”▒╚Ęų╬÷Īóć°ā╚╚╦ą╬äōŲ¾ī”▒╚Ęų╬÷Īó╚╦ą╬╣½╦Š╗∙▒ŠĖ┼╩÷Īó╚┌┘YŪķørĪó╚╦ą╬ÖCŲ„╚╦«aŲĘ╝░ģóöĄĪó«aŲĘĄ³┤·╝░╔╠śI╗»▀Mš╣Īó▒Ŗ╚╦ą╬ÖCŲ„╚╦«aŲĘģóöĄ║═╔╠śI╗»▀Mš╣ī”▒╚Īó╚╦ą╬ÖCŲ„╚╦ŅIė“║╦ą─╝╝ąg
╔Ņ╚ļĘų╬÷┴╦╚½Ū“┤µā”ąąśIĄ─¼FĀŅ┼cĖ±ŠųĪŻ┐╔ęįšfŻ¼┤µā”ąąśIĄ─Ī░ÅŖš▀║ŃÅŖĪ▒┌ģä▌╩«Ęų├„’@;╬┤üĒ╚½Ū“öĄō■┴┐īóęį├┐─Ļ│¼▀^30%Ą─╦┘Č╚į÷ķL
░▓╚½▒O£yųŪ ─▄▓╝┐žŪ“ ╬ŻļUū„śI░▓ ╚½▒O£yŅAŠ» įOéõ╝░ŽĄĮy ╚╦åTČ©╬╗▒O £yŅAŠ»ŽĄĮy ėąŽ▐┐šķgöĄ ō■▓╔╝»ŅAŠ» čbéõ ╣żśI┬Ģ╝y▒O £yįOéõ ¤oŠĆ¤oį┤│¼ ┬Ģ▓©£y║±įO éõ
┐Ų╝╝░ÕēK╩ąųĄÖÓųžėą▌^┤¾╠ß╔²┐šķgŻ¼ ▓┐Ęų╣└ųĄęčŠ▀éõā×ä▌Ż╗ļSų°Į³─Ļ│ų└mŽ“äōą┬“īäė▐D ą═Ż¼ė»└¹ŽÓī”ā×ä▌╠ß╔²Ż¼ųąć°┐Ų╝╝╣╔═Č┘Yąįār▒╚═╗│÷
2023─Ļųąć°Ą═┐šĮøØ·ęÄ─Ż═╗ŲŲ5000ā|į¬Ż¼2026─Ļėą═¹═╗ŲŲ10000ā|į¬ĪŻĄ═┐šĮøØ·┤µį┌ ╚²īė╚fā|┐šķgŻ¼Ą┌ę╗īė╩ŪĄ═┐š’wąą╗ŅäėĀ┐ę²Ż¼Ą┌Č■īė╩ŪĄ═┐š┐šė“╣▄└Ē┼cķ_░l└¹ė├Ħäė
ęĢŅl╔·│╔─Żą═╦ŃĘ©ų„ę¬ė╔╗∙ė┌SDųļ╔·│╔║═╗∙ė┌Ģr┐šPatchesā╔ĘNĘČ╩Įśŗ│╔Ż¼╩Ūą¦┬╩┼cą¦ęµĄ─▒╚Ų┤;Soraė¢ŠÜ╦Ń┴”ąĶŪ¾╩ŪGPT-4Ą─4.5▒ČŻ¼Č°═Ų└Ē╦Ń┴”ąĶŪ¾ĮėĮ³GPT-4Ą─400▒Č
į┌▀@Ę▌░ūŲżĢ°└’Ęų UHFĪóHFĪóLF ÄūéĆų„ꬥ─ŅlČ╬ī” RFID ¤oį┤╬’┬ōŠW«aśI▀Mąąįö╝ÜĄ─╩ął÷Ęų╬÷ęį╝░öĄō■│╩¼FŻ¼▓óŪęī”├┐éĆŅlČ╬Ą─«aśIµ£═µ╝ęęį╝░ų„ę¬æ¬ė├ŅIė“▀Mąą┴╦╚½├µĘų╬÷
╔Ž░ļ─ĻŻ¼B2C ŠWĮj┴Ń╩█Ņ~į÷ķL13.6%,š╝ŠWĮj┴Ń╩█Ņ~▒╚ųž×ķ84.3%;C2C ŠWĮj┴Ń╩█Ņ~ Ž┬ĮĄ5.4%,š╝ŠWĮj┴Ń╩█Ņ~▒╚ųž×ķ15.7%Ż╗ŠWĮj┴Ń╩█ŲĮ┼_ĄĻõüöĄ┴┐╝s2559.7╚f╝ęŻ¼į÷ķL2.8%
▓═’ŗ┼õ╦═ĪóŠŲĄĻ┼õ╦═Īó╔╠ė├ŪÕØŹÖCŲ„╚╦╩Ū╩ął÷│÷žø┴┐Ū░╚²«aŲĘ;▓═’ŗ┼õ╦═ÖCŲ„╚╦ęį▀BµiĪóųąĖ▀Č╦ŠŲĄĻ×ķų„ę¬╩ął÷Ż¼ĻPūóĪ░ČÓÖCģf