š╣ÅdÖCŲ„╚╦ŽĄĮyĖ„ė▓╝■─ŻēKų„ę¬ė╔CAN ┐éŠĆ▀BĮėŻ¼═©▀^Įyę╗Ą─CAN┐éŠĆģfūhīóĖ„─ŻēK║åå╬Ąž╝ė▌dĄĮŽĄĮyųąĪŻŽĄĮyų„ę¬ė╔ļŖį┤ŽĄĮyĪó▀\äė┐žųŲŽĄĮyĪóé„ĖąŽĄĮyĄ╚ĮM│╔Ż¼Ųõųą▀\äė┐žųŲŽĄĮy░³└©ļp▒█ŽĄĮy╝░ęŲäėŽĄĮyŻ¼é„ĖąŲ„ŽĄĮy░³└©│¼┬Ģ▓©ŽĄĮyĪóRFIDČ©╬╗ŽĄĮyĪóęĢėXŽĄĮyĮM│╔ĪŻŠ▀¾wĮYśŗė╔łD7-3-12╦∙╩ŠĪŻ
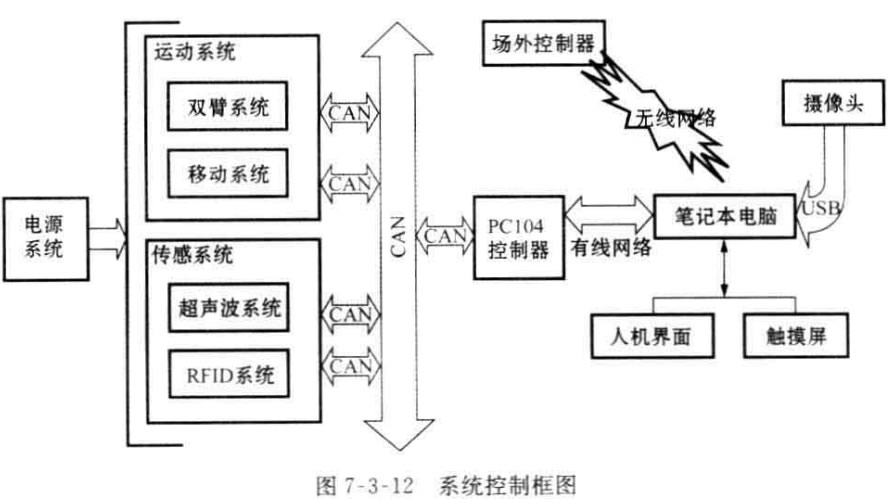
╩ų▒█Ė„ĻP╣Ø┐žųŲļŖ┬Ę▓╔ė├Ęų▓╝╩Į┐žųŲŽĄĮyŻ¼Ė„ĻP╣Ø┐žųŲŲ„(ų„ MCU ╩Ū TMS320LF2407)ė╔CAN ┐éŠĆŽÓ▀B(CAN2.0-A ░µ▒Š)ĪŻ┐žųŲų▄Ų┌×ķ5m (╝┤╔Ž╬╗ÖC ┼c ╦∙ ėą ĻP ╣Ø ┐ž ųŲ Ų„ ═© ą┼ ę╗ ▒ķ Ż¼ į┘ ╝ė ę╗ Č© įŻ Č╚ ║¾ Ą─ Ģr ķg ) ĪŻ Ė„ ĻP ╣Ø ┐ž ųŲ ļŖ ┬Ę ĮY śŗ ╚ń
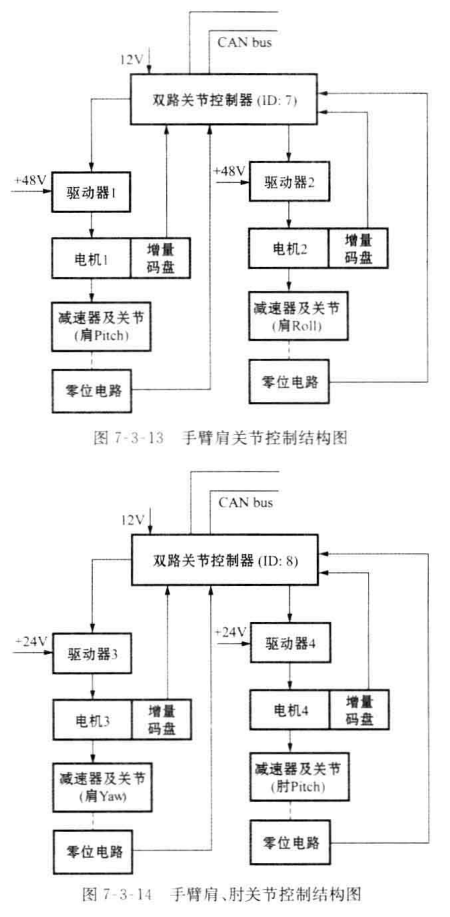
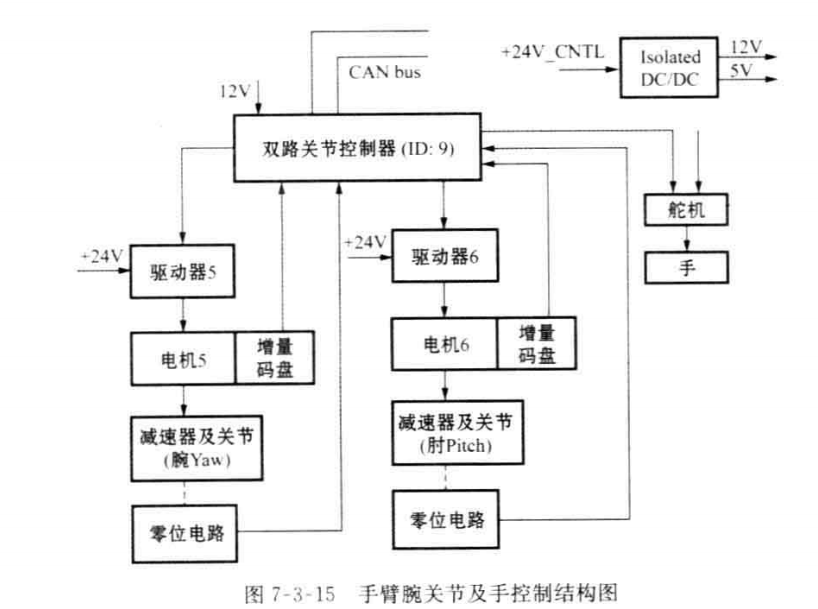
łD7 - 3 - 13ĪółD7 - 3 - 14╝░łD7 - 3 - 15╦∙╩ŠĪŻ
╔Ž╬╗┐žųŲėŗ╦ŃÖC▓╔ė├PC ėŗ╦ŃÖCŻ¼CAN ┐©▀xė├ų▄┴ó╣”Ą─PC104CAN2 ═©ą┼┐©ĪŻ ╝ńPitchĪó╝ń RollĪó╝ń YawĪóųŌPitchĪó═¾ YawĪó═¾Pitch Ė„ĻP╣ØĄ─ųC▓©£p╦┘Ų„£p╦┘▒╚Ęų äe╩Ū100,100.100,100,100,100;ļŖÖC┤a▒P×ķį÷┴┐┤a▒PŻ¼ŠĆöĄ×ķ1000,1000,1000, 1000,1000,1000,ų▒┴„ėą╦óļŖÖC╣”┬╩(RE ŽĄ┴ą)Ęųäe×ķ90W,90W.20W,60W,20W.
20W.
ļp▒█ÖCŲ„╚╦Ė„▀\äė▓┐ĘųŠ∙▀xė├ų▒┴„╦┼Ę■ļŖÖCŻ¼ė├ė┌╔Ē¾wĖ„éĆĻP╣Ø▀\äė║═Ąū▒P ęŲäėĄ─äė┴”Ż¼Ė∙ō■ļp▒█ÖCŲ„╚╦Ą─▀\äė╠ž³cŻ¼┐╔┤¾ų┬īóų▒┴„╦┼Ę■ļŖÖCĄ─▀\ąąĘĮ╩ĮĘų×ķ ā╔ ĘN Ż║
ĪżĄū▒PļŖÖC╣żū„ė┌╦┘Č╚┐žųŲ─Ż╩ĮĪŻ
Īż╔Ž╔ĒĖ„éĆĻP╣ØļŖÖC╣żū„ė┌╬╗ų├┐žųŲ─Ż╩ĮĪŻ
ėŁ┘eŪ░┼_ÖCŲ„╚╦┐žųŲŽĄĮyĖ„ė▓╝■─ŻēKų„ę¬ė╔CAN┐éŠĆ▀BĮė,īóĖ„─ŻēK║åå╬Ąž╝ė▌dĄĮŽĄĮyųą,äė┐žųŲŽĄĮy░³└©ļp▒█ŽĄĮy╝░ęŲäėŽĄĮyŻ¼é„ĖąŲ„ŽĄĮy░³└©│¼┬Ģ▓©ŽĄĮy
ėŁ┘eÖCŲ„╚╦▓╔ė├įņą═╗ŅØŖĄ─┐©═©ą╬Ž¾,Ņ^▓┐ėąļp─┐ęĢėXé„ĖąŲ„,╔Ē¾w▓┐Ęųų„ę¬░³└©ė|├■Ų┴,ÖCąĄ▒█║═ÖCąĄ╩ų,╔ĒĖ▀╝s1.4Ī½1.5m, ▓╔ė├▌å╩ĮęŲäėĘĮ╩Į,ūŅĖ▀ęŲäė╦┘Č╚╝s18m/min
AIėŁ┘eĮė┤²ÖCŲ„╚╦Ą─║╦ą─╩Ū╚╦ÖCĮ╗╗ź,į┌ųŪ─▄╚╦ÖCĮ╗╗źĄ─蹊┐ųą,ī”ŪķĖąĄ─ūRäeĪóĘų╬÷Īó└ĒĮŌĪó▒Ē▀_Ą──▄┴”╩Ūųž³cčą░lĘĮŽ“;Å─╚╦ŅÉĄ─šZę¶,├µ▓┐▒ĒŪķĄ╚ČÓéĆŠSČ╚▓ČūĮŪķĖąą┼ŽóŻ¼▓óī”Ųõ▀MąąĘų╬÷║═┼ąäe
ČÓ─ŻæBĖąų¬╝╝ągūīÖCŲ„╚╦Š▀éõŅÉ╦Ų╚╦ŅÉ╬ÕĖąĄ─ČÓ─ŻæBųŪ─▄Ėąų¬─▄┴”;═©▀^▒ĒŪķūRäeĪóšZę¶ŪķĖąĘų╬÷Ą╚╝╝ągŻ¼ūīÖCŲ„╚╦Ėąų¬╚╦ ŅÉŪķŠw▓óū÷│÷ŽÓæ¬ŪķĖą╗žæ¬Ż¼į÷╝ėėH║═┴”║═╗źäėąį
AI┼Ń░ķÖCŲ„╚╦į┌═Ōė^įOėŗŠ▀éõ╚╦ŅÉŽÓ╦Ų╠žš„;į┌ąą×ķ─Ż╩Į╔Ž─ŻĘ┬╚╦ŅÉĄ─ąą×ķ,Š▀éõ╩ųč█ģfš{,äėæBūŃ┐žųŲ─▄┴”;į┌Ė„éĆŅIė“Ą─īŹļHæ¬ė├║═ė├═Š,ģfų·╚╦ŅÉ═Ļ│╔Ė„ĘNÅ═ļs╚╬äš
ÖCŲ„╚╦ÖCąĄ╩ųėąČÓéĆĻP╣Ø║═ČÓéĆūįė╔Č╚Ż¼Š▀ėą║▄Ė▀Ą─ņ`╗Ņąį;┼õų├┴╦▒žę¬Ą─é„ĖąŲ„Ż¼┐╔ęįŠ½┤_┐žųŲÖCąĄ╩ųĄ─▓┘ū„;╬óąĪĄ─═Ōą╬│▀┤ń╩╣Ą├ÖCąĄ╩ųŠ▀ėą║▄Ė▀Ą─▓┘ū„Š½Č╚
š╣ÅdėŁ┘eÖCŲ„╚╦Ą─Ī░ąĪ─XĪ▒║╦ą─╝╝ągš²į┌Å─╗∙ė┌─Żą═Ą─┐žųŲĘĮĘ©Ž“╗∙ė┌īW┴ĢĄ─┐žųŲĘĮĘ©č▌▀M,ęĢėX-šZčį─Żą═×ķÖCŲ„╚╦īW┴ĢÅ═ļs╝╝─▄╠ß╣®┴╦ą┬Ą─ĘČ╩Į,ėą║▄ÅŖĄ─Ę║╗»─▄┴”,─▄ē“Ė∙ō■▓╗═¼Ą─ųĖ┴ŅĮM║Ž╝╝─▄
╗∙ė┌─Żą═Ą─ąĪ─X╝╝ąg┬ĘŠĆ┐žųŲĘĮĘ©ėąZMP┼ąō■╝░ŅAė^┐žųŲ,╗ņļs┴ŃäėæBęÄäØĘĮĘ©,╠ōöM─Żą═ĮŌ±Ņ┐žųŲ;╗∙ė┌īW┴ĢĄ─ąĪ─X╝╝ąg┬ĘŠĆ┐žųŲĘĮĘ©ėąÅŖ╗»īW┴Ģ║═─ŻĘ┬īW┴Ģ
ėŁ┘eĘ■äšÖCŲ„╚╦ąĶ꬚¹║ŽęĢėX,┬ĀėX,ė|ėXĄ╚ČÓĘNĖąų¬─ŻæB,╩╣ÖCŲ„╚╦į┌Å═ļsł÷Š░ųąū÷│÷Ė³£╩┤_Ą─øQ▓▀;ĮY║Ž┬ĀėX║═ė|ėXą┼ŽóŻ¼ÖCŲ„╚╦┐╔ęįĖ³║├Ąž└ĒĮŌ╚╦ŅÉĄ─ųĖ┴Ņ║═ŪķĖąĀŅæB
LLM(┤¾šZčį─Żą═+VFM(ęĢėX╗∙ĄA─Żą═)īŹ¼F╚╦ÖCšZčįĮ╗╗źĪó╚╬äš└ĒĮŌĪó═Ų└Ē║═ęÄäØ;VLM(ęĢėX-šZčį─Żą═)īŹ¼FĖ³£╩┤_Ą─╚╬äšęÄäØ║═øQ▓▀;VLA (ęĢėX-šZčį-äėū„─Żą═)ĮŌøQÖCŲ„╚╦▀\äė▄ē█EøQ▓▀å¢Ņ}
ėŁ┘eÖCŲ„╚╦ąĶꬊ▀éõ┼c╚╦ŅÉīŹĢrĄ─╚╬äš╝ēĮ╗╗ź─▄┴”,┐ņ╦┘└ĒĮŌ╚╦ŅÉ═©▀^šZčį,╩ųä▌Ą╚ĘĮ╩ĮĮo│÷Ą─ųĖ┴Ņ,ėąą¦ł╠ąą;ėŁ┘eÖCŲ„╚╦ąĶę¬─▄ē“═©▀^ęĢėXĪó┬ĀėXĪóė|ėXĄ╚ČÓĘNĖą╣┘½@╚Īą┼Žó
LDS SLAM ┼c VSLAM Ė„ėąā×┴ė,Č■š▀ŽÓ╚▌╗“│╔×ķąąśIų„┴„░lš╣ĘĮŽ“ų«ę╗;LDS SLAM ╝╝ąg┐╔ęĢĘČć·ÅV,ĄžłDŠ½Č╚Ė³Ė▀;VSLAM╝╝ąg│╔▒ŠĖ³Ą═,ē█├³ķL,▓╗ęūōp





